目标:在”已知环境模型”的理想假设下,推导出 Bellman 方程,掌握策略迭代与值迭代,为后续无模型算法打好理论地基。
Bellman 方程通过”自举”的方式将当前状态的价值与下一状态的价值联系起来,形成一个递推闭环。它是 RL 中所有算法的数学基础。Bellman 方程构造出方程组,是可以用数值方法求解的。
4.1 Bellman 期望方程:完整推导
Bellman 方程是 RL 中最重要的方程组,几乎所有算法都以它为出发点。下面对 V 函数和 Q 函数分别给出不省略任何步骤的完整推导。
4.1.1 状态价值 V 函数的 Bellman 方程
直觉:站在状态 $s$,按策略 $\pi$ 行动,平均能拿到多少累积奖励。
第 1 步:从定义出发
\[V^\pi(s) = \mathbb{E}_\pi\!\left[G_t \,\Big|\, s_t = s\right]\]这是状态价值函数的定义:它是从状态 $s$ 出发、按策略 $\pi$ 行动所能获得的期望累积折扣奖励。
第 2 步:代入回报的递推关系
回报的递推关系(第 3 章已推导):$G_t = r_t + \gamma G_{t+1}$
将其代入期望中:
\[V^\pi(s) = \mathbb{E}_\pi\!\left[r_t + \gamma G_{t+1} \,\Big|\, s_t = s\right]\]第 3 步:利用期望的线性性拆开两项
期望可以对求和拆分(线性性):
\[V^\pi(s) = \mathbb{E}_\pi\!\left[r_t \,\Big|\, s_t = s\right] + \gamma\, \mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t = s\right]\]现在对这两项分别展开。
第 4 步:展开第一项 $\mathbb{E}_\pi[r_t \mid s_t=s]$
“在状态 $s$ 获得的即时奖励”需要同时对动作和下一状态取期望,因为奖励 $\mathcal{R}(s,a,s’)$ 依赖于 $(s,a,s’)$:
\[\mathbb{E}_\pi\!\left[r_t \,\Big|\, s_t = s\right] = \sum_a \underbrace{\pi(a|s)}_{\text{策略选动作}}\; \sum_{s'} \underbrace{\mathcal{P}(s'|s,a)}_{\text{环境转移}}\; \underbrace{\mathcal{R}(s,a,s')}_{\text{即时奖励}}\]逐层理解:
-
外层 $\sum_a \pi(a s)$:按策略 $\pi$ 对所有可能动作加权求和 -
内层 $\sum_{s’} \mathcal{P}(s’ s,a)$:对所有可能的下一状态加权求和 - $\mathcal{R}(s,a,s’)$:执行动作 $a$ 后转移到 $s’$ 获得的即时奖励
第 5 步:展开第二项 $\mathbb{E}\pi[G{t+1} \mid s_t=s]$
$G_{t+1}$ 是从下一状态 $s_{t+1}$ 开始的回报。要对它取期望,先用全期望公式——以下一状态 $s’$ 为条件拆分:
\[\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t = s\right] = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a)\; \underbrace{\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_{t+1} = s'\right]}_{= V^\pi(s')}\]关键一步:$\mathbb{E}\pi[G{t+1} \mid s_{t+1}=s’]$ 正好是下一状态 $s’$ 的价值函数 $V^\pi(s’)$——这就是”递推”结构。
于是:
\[\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t = s\right] = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a)\, V^\pi(s')\]第 6 步:合并两项,得到最终结果
将第 4 步和第 5 步代回第 3 步:
\[V^\pi(s) = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a)\, \mathcal{R}(s,a,s') \;+\; \gamma \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a)\, V^\pi(s')\]两项共享相同的求和结构,提取公因式:
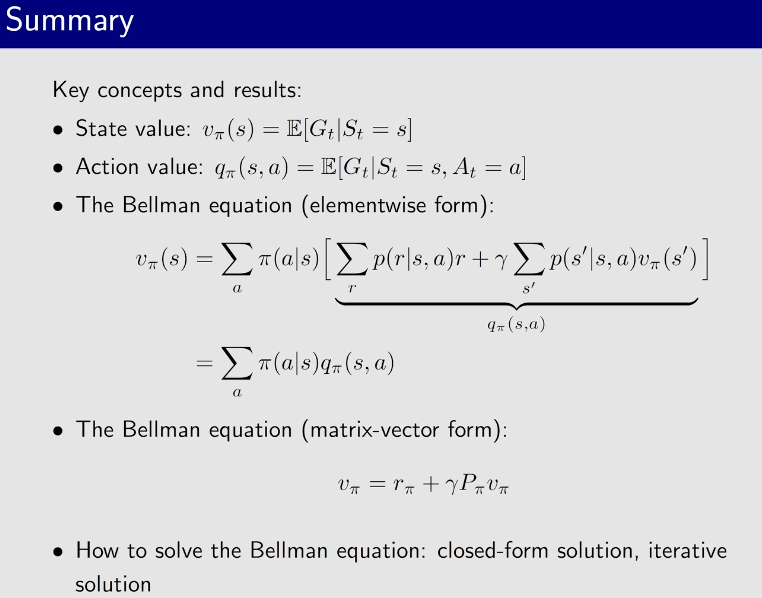
\[\boxed{V^\pi(s) = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma V^\pi(s') \right]}\]这就是 V 函数的 Bellman 期望方程。
语言描述:当前状态价值 = 对所有(动作, 下一状态)组合求加权平均,每种组合的贡献是”即时奖励 + 折扣后的下一状态价值”。
4.1.2 动作价值 Q 函数的 Bellman 方程
直觉:在状态 $s$,先执行动作 $a$,之后再按策略 $\pi$ 行动,平均能拿到多少累积奖励。
第 1 步:从定义出发
\[Q^\pi(s, a) = \mathbb{E}_\pi\!\left[G_t \,\Big|\, s_t = s,\, a_t = a\right]\]与 $V^\pi$ 的区别:$Q^\pi$ 还固定了当前动作 $a$,而 $V^\pi$ 是对所有动作取策略加权平均。
第 2 步:代入 $G_t = r_t + \gamma G_{t+1}$
\[Q^\pi(s, a) = \mathbb{E}_\pi\!\left[r_t + \gamma G_{t+1} \,\Big|\, s_t = s,\, a_t = a\right]\]第 3 步:用期望线性性拆分
\[Q^\pi(s, a) = \underbrace{\mathbb{E}_\pi\!\left[r_t \,\Big|\, s_t=s, a_t=a\right]}_{\text{第一项:即时奖励}} + \gamma\,\underbrace{\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t=s, a_t=a\right]}_{\text{第二项:未来回报}}\]第 4 步:展开第一项
动作 $a$ 已固定,只需对下一状态 $s’$ 求和:
\[\mathbb{E}_\pi\!\left[r_t \,\Big|\, s_t=s, a_t=a\right] = \sum_{s'} \mathcal{P}(s'|s,a)\, \mathcal{R}(s,a,s')\]第 5 步:展开第二项——两步拆分
5a. 先以下一状态 $s’$ 为条件(因为 $a$ 已固定,只需对 $s’$ 积分):
\[\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t=s, a_t=a\right] = \sum_{s'} \mathcal{P}(s'|s,a)\; \mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_{t+1}=s'\right]\]5b. 再展开 $\mathbb{E}\pi[G{t+1} \mid s_{t+1}=s’]$
这是从 $s’$ 出发、按策略 $\pi$ 的期望回报,即 $V^\pi(s’)$。
而 $V^\pi(s’)$ 又等于按策略对下一步动作 $a’$ 加权的 $Q^\pi$:
代入:
\[\mathbb{E}_\pi\!\left[G_{t+1} \,\Big|\, s_t=s, a_t=a\right] = \sum_{s'} \mathcal{P}(s'|s,a) \sum_{a'} \pi(a'|s')\, Q^\pi(s', a')\]第 6 步:合并,得到最终结果
\[\boxed{Q^\pi(s, a) = \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma \sum_{a'} \pi(a'|s')\, Q^\pi(s', a') \right]}\]等价写法(用 $V^\pi$ 代替内层求和):
\[Q^\pi(s, a) = \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma V^\pi(s') \right]\]语言描述:动作价值 = 对所有可能的下一状态求加权平均,每种结果的贡献是”即时奖励 + 折扣后的下一状态价值”。
4.1.3 V 与 Q 的互推关系总结
两个方程联立,可以相互表达:
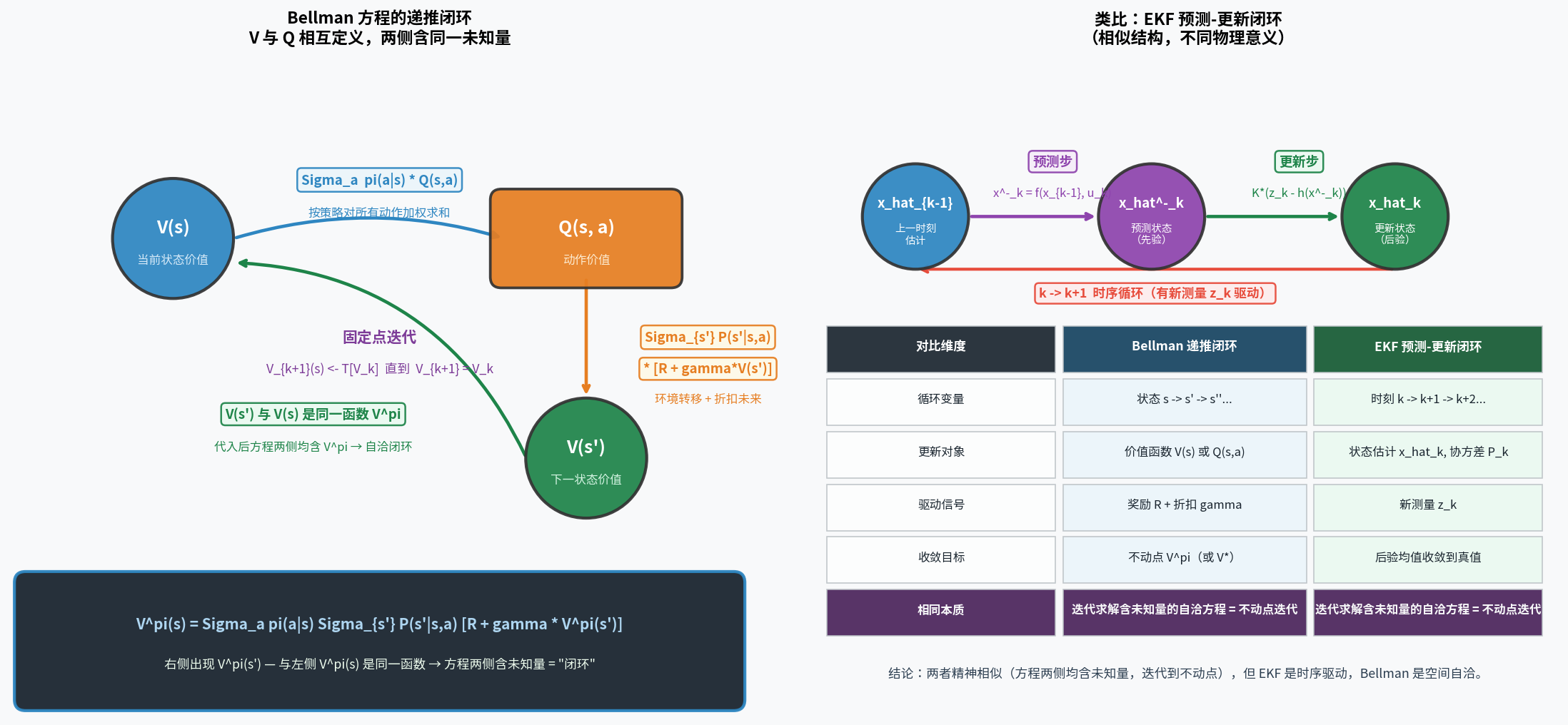
\[V^\pi(s) = \sum_a \pi(a|s)\, Q^\pi(s, a) \qquad \Longleftrightarrow \qquad Q^\pi(s,a) = \sum_{s'} \mathcal{P}(s'|s,a)\bigl[\mathcal{R}(s,a,s') + \gamma V^\pi(s')\bigr]\]V(s) ──[策略加权 Σ_a π(a|s)]──► Q(s,a)
│
Q(s,a) ──[环境转移 Σ_{s'} P]──► V(s')
这两个方程构成一个递推闭环,是后续所有算法(策略迭代、值迭代、Q-Learning、Actor-Critic)的数学基础。
与 EKF 的类比:这里的”闭环”和扩展卡尔曼滤波(EKF)的预测-更新循环在结构上相似——两者都是”方程两侧含同一未知量,迭代求解到不动点”——但物理意义不同:EKF 的循环是时序驱动的(每到新时刻 $k$ 由新测量 $z_k$ 触发一次更新);Bellman 的闭环是空间自洽的($V^\pi(s)$ 的定义引用了同一函数在 $s’$ 处的值,通过迭代 $V_{k+1} \leftarrow \mathcal{T}[V_k]$ 收敛到不动点 $V^\pi$)。
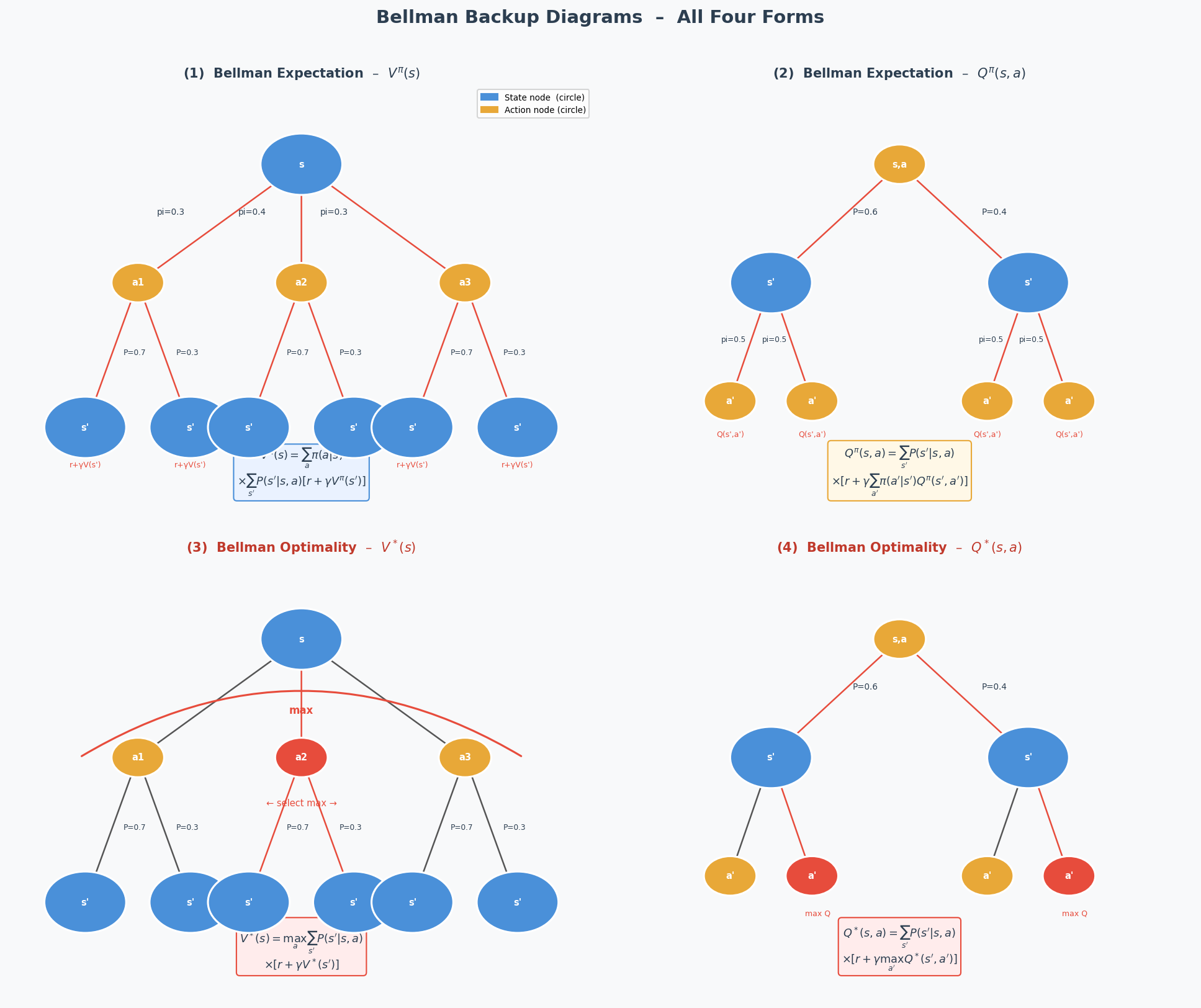
4.1.4 推导的图示理解
Bellman 方程的"备份树"
状态 s
│
│ 按策略 π 选动作
├───── a1 (概率 π(a1|s))
│ ├── s'1 (概率 P(s'1|s,a1)) ── R(s,a1,s'1) + γV(s'1)
│ └── s'2 (概率 P(s'2|s,a1)) ── R(s,a1,s'2) + γV(s'2)
│
└───── a2 (概率 π(a2|s))
├── s'3 (概率 P(s'3|s,a2)) ── R(s,a2,s'3) + γV(s'3)
└── s'4 (概率 P(s'4|s,a2)) ── R(s,a2,s'4) + γV(s'4)
V(s) = 对上述所有叶子节点的加权平均
= Σ_a π(a|s) · Σ_{s'} P(s'|s,a) · [R + γV(s')]
4.1.5 Bellman 方程的矩阵向量形式及其求解
问题的本质:Bellman 期望方程里,左侧的 $V^\pi(s)$ 和右侧的 $V^\pi(s’)$ 是同一个未知量,直接看像是”鸡生蛋蛋生鸡”。矩阵向量形式把所有状态的方程同时写出来,揭示它其实是一个线性方程组。
第 1 步:把所有状态的方程”叠”成向量
假设状态空间有 $n$ 个离散状态 ${s_1, s_2, \dots, s_n}$,定义:
\[\mathbf{v}^\pi = \begin{bmatrix} V^\pi(s_1) \\ V^\pi(s_2) \\ \vdots \\ V^\pi(s_n) \end{bmatrix} \in \mathbb{R}^n\]这是我们要求解的未知向量(对应幻灯片中圈出的 $v_\pi(s)$)。
第 2 步:定义策略下的奖励向量 $\mathbf{r}^\pi$
对每个状态 $s_i$,定义在策略 $\pi$ 下的期望即时奖励:
\[r^\pi(s_i) = \sum_a \pi(a|s_i) \sum_{s'} \mathcal{P}(s'|s_i, a)\, \mathcal{R}(s_i, a, s')\]叠成列向量:
\[\mathbf{r}^\pi = \begin{bmatrix} r^\pi(s_1) \\ r^\pi(s_2) \\ \vdots \\ r^\pi(s_n) \end{bmatrix} \in \mathbb{R}^n\]第 3 步:定义策略下的状态转移矩阵 $\mathbf{P}^\pi$
对每对 $(s_i, s_j)$,定义在策略 $\pi$ 下从 $s_i$ 转移到 $s_j$ 的概率:
\[P^\pi(s_i, s_j) = \sum_a \pi(a|s_i)\, \mathcal{P}(s_j | s_i, a)\]叠成 $n \times n$ 矩阵:
\[\mathbf{P}^\pi = \begin{bmatrix} P^\pi(s_1,s_1) & \cdots & P^\pi(s_1,s_n) \\ \vdots & \ddots & \vdots \\ P^\pi(s_n,s_1) & \cdots & P^\pi(s_n,s_n) \end{bmatrix}\]每行之和为 1($\mathbf{P}^\pi$ 是随机矩阵)。
第 4 步:写出矩阵形式
将 Bellman 方程(对所有状态同时写出):
\[V^\pi(s_i) = r^\pi(s_i) + \gamma \sum_{s_j} P^\pi(s_i, s_j)\, V^\pi(s_j), \quad \forall i\]等价于矩阵乘法:
\[\mathbf{v}^\pi = \mathbf{r}^\pi + \gamma\, \mathbf{P}^\pi\, \mathbf{v}^\pi\] \[\boxed{\mathbf{v}^\pi = \mathbf{r}^\pi + \gamma\, \mathbf{P}^\pi\, \mathbf{v}^\pi}\]矩阵向量形式。未知量 $\mathbf{v}^\pi$ 同时出现在等号两侧——这正是”one unknown relies on another unknown”的数学表达。
第 5 步:解方程——移项整理
将含 $\mathbf{v}^\pi$ 的项全部移到左侧:
\[\mathbf{v}^\pi - \gamma\, \mathbf{P}^\pi\, \mathbf{v}^\pi = \mathbf{r}^\pi\]提取公因式($\mathbf{I}$ 是 $n \times n$ 单位矩阵):
\[(\mathbf{I} - \gamma\, \mathbf{P}^\pi)\, \mathbf{v}^\pi = \mathbf{r}^\pi\]两侧左乘逆矩阵,得到解析解(闭合形式):
\[\boxed{\mathbf{v}^\pi = (\mathbf{I} - \gamma\, \mathbf{P}^\pi)^{-1}\, \mathbf{r}^\pi}\]为什么 $(\mathbf{I} - \gamma \mathbf{P}^\pi)$ 一定可逆?
因为 $\mathbf{P}^\pi$ 的谱半径为 1(随机矩阵),乘以 $\gamma < 1$ 后谱半径 $< 1$,所以 $(\mathbf{I} - \gamma \mathbf{P}^\pi)$ 的特征值均 $> 0$,矩阵满秩,逆矩阵存在。
第 6 步:为什么实际不用解析解?
| 方法 | 公式 | 计算复杂度 | 适用场景 |
|---|---|---|---|
| 解析解 | $(\mathbf{I} - \gamma \mathbf{P}^\pi)^{-1} \mathbf{r}^\pi$ | $O(n^3)$(矩阵求逆) | 状态数 $n$ 很小时可行 |
| 迭代策略评估 | $\mathbf{v}_{k+1} \leftarrow \mathbf{r}^\pi + \gamma \mathbf{P}^\pi \mathbf{v}_k$ | $O(n^2)$ 每步 | 状态数较大时使用 |
| 神经网络近似 | $V_\theta(s) \approx V^\pi(s)$ | $O(\text{samples})$ | 连续/高维状态空间 |
对机器人行走($n = 100^{48}$),解析解和迭代策略评估都不可行——这正是无模型 + 神经网络近似方法存在的根本原因(见第 4.7 节)。
矩阵形式的直观理解:
v = r + γ P v ← Bellman 方程(矩阵形式)
(I - γP)v = r ← 移项
v = (I - γP)^{-1} r ← 解析解:本质是对无穷级数求和
展开 (I - γP)^{-1} = I + γP + γ²P² + γ³P³ + ...
→ v = r + γPr + γ²P²r + ...
↑ ↑ ↑
当前奖励 1步后期望 2步后期望
这正是折扣回报 G_t = r_t + γr_{t+1} + γ²r_{t+2} + ... 的矩阵表达!
4.2 Bellman 最优方程
4.2.1 动机:为什么要找”最优价值函数”?
回顾期望方程:$V^\pi(s)$ 依赖于策略 $\pi$——不同策略给出不同的价值。自然地问:
所有策略里,哪个策略能让每个状态的价值都最大?
最优价值函数的定义:
\[V^*(s) = \max_\pi V^\pi(s), \quad \forall s \in \mathcal{S}\] \[Q^*(s, a) = \max_\pi Q^\pi(s, a), \quad \forall s \in \mathcal{S},\; a \in \mathcal{A}\]最优策略:一旦知道 $Q^$,最优策略就是贪心地选 $Q^$ 最大的动作:
\[\pi^*(s) = \arg\max_a Q^*(s, a)\]重要定理:对任何有限 MDP,存在确定性最优策略 $\pi^*$,它同时最大化所有状态的价值。
4.2.2 BOE 引入:从期望方程到最优方程
Bellman 期望方程(已推导)回顾:
\[V^\pi(s) = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma V^\pi(s')\bigr]\]它描述的是给定策略 $\pi$ 时的价值。
问题:如果我们想直接描述最优价值 $V^*(s)$ 满足什么方程,该怎么写?
| 关键观察:最优策略在每个状态都选择使价值最大的动作,等价于把期望方程中的加权平均 $\sum_a \pi(a | s)$ 换成 $\max_a$: |
Bellman 期望方程: V^π(s) = Σ_a π(a|s) · [...] ← 按策略加权平均
Bellman 最优方程: V*(s) = max_a [...] ← 选使价值最大的动作
4.2.3 BOE:右侧为何取 max?
直觉推导:假设我们已经知道所有下一状态的最优价值 $V^*(s’)$,那么在状态 $s$ 选择动作 $a$ 的期望回报是:
\[Q^*(s, a) = \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma V^*(s')\bigr]\]最优策略应选使这个值最大的动作,所以:
\[V^*(s) = \max_a Q^*(s, a) = \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma V^*(s')\bigr]\]为什么可以取 max 而不是加权平均?
因为最优策略是确定性的:对每个状态,它把所有概率都压在最好的那个动作上。取 $\max_a$ 正是确定性贪心策略的数学表达。
类似地,$Q^*$ 的方程:最优动作 $a$ 执行后,下一状态 $s’$ 的最优行为同样是贪心选最优动作:
\[\boxed{Q^*(s, a) = \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma \max_{a'} Q^*(s', a') \right]}\]4.2.4 BOE:改写为不动点方程 $v = f(v)$
矩阵形式回顾:Bellman 期望方程写成矩阵形式是 $\mathbf{v}^\pi = \mathbf{r}^\pi + \gamma \mathbf{P}^\pi \mathbf{v}^\pi$(线性方程)。
Bellman 最优方程(BOE)的矩阵形式:
\[\mathbf{v}^* = \mathcal{T}(\mathbf{v}^*), \quad \text{其中} \quad [\mathcal{T}(\mathbf{v})]_s = \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma [\mathbf{v}]_{s'}\bigr]\] \[v=\max _\pi\left(r_\pi+\gamma P_\pi v\right)\]这里 $\mathcal{T}$ 称为 Bellman 最优算子(Bellman Optimality Operator)。
与期望方程的对比:
| Bellman 期望方程 | Bellman 最优方程 | |
|---|---|---|
| 形式 | $\mathbf{v}^\pi = \mathbf{r}^\pi + \gamma \mathbf{P}^\pi \mathbf{v}^\pi$ | $\mathbf{v}^* = \mathcal{T}(\mathbf{v}^*)$ |
| 方程类型 | 线性(有解析解) | 非线性(取 max 是非线性算子) |
| 未知量 | $\mathbf{v}^\pi$(给定 $\pi$) | $\mathbf{v}^*$(最优值,需要找) |
| 求解方式 | 矩阵求逆 $(\mathbf{I}-\gamma\mathbf{P}^\pi)^{-1}\mathbf{r}^\pi$ | 值迭代 / 策略迭代(迭代到不动点) |
BOE 是一个不动点方程:$\mathbf{v}^$ 是算子 $\mathcal{T}$ 的不动点,即把 $\mathcal{T}$ 作用于 $\mathbf{v}^$ 后还是 $\mathbf{v}^*$ 本身。
4.2.5 压缩映射定理:唯一解的保证
核心问题:不动点方程 $v = \mathcal{T}(v)$ 有解吗?唯一吗?怎么找?
压缩映射定理(Banach 不动点定理):
若 $\mathcal{T}: \mathbb{R}^n \to \mathbb{R}^n$ 是压缩映射,即存在 $0 \leq \gamma < 1$ 使得 \(\|\mathcal{T}(u) - \mathcal{T}(v)\|_\infty \leq \gamma \|u - v\|_\infty, \quad \forall u, v\) 则 $\mathcal{T}$ 有唯一不动点 $v^$,且从任意初始点 $v_0$ 出发,迭代序列 $v_{k+1} = \mathcal{T}(v_k)$ 收敛到 $v^$。
Bellman 最优算子 $\mathcal{T}$ 是压缩映射(证明思路):
对任意 $u, v \in \mathbb{R}^n$,任意状态 $s$:
\[[\mathcal{T}(u)]_s = \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma u_{s'}\bigr]\] \[[\mathcal{T}(v)]_s = \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma v_{s'}\bigr]\]| 利用 $ | \max f - \max g | \leq \max | f - g | $ 和 $\sum_{s’} \mathcal{P}(s’ | s,a) = 1$: |
对所有 $s$ 取上确界:$|\mathcal{T}(u) - \mathcal{T}(v)|\infty \leq \gamma |u - v|\infty$
由于 $\gamma < 1$,$\mathcal{T}$ 是压缩映射。结论:BOE 有唯一解 $V^*$,值迭代必然收敛。
压缩映射的几何直觉:
初始误差 ||v₀ - v*||
→ 迭代 1 次后误差变为 γ||v₀ - v*|| (缩小到 γ 倍)
→ 迭代 k 次后误差变为 γᵏ||v₀ - v*|| (指数衰减)
→ k → ∞ 时误差 → 0 (收敛到 v*)
因为 γ < 1,所以 γᵏ → 0。无论从哪里出发,都会收敛。
4.2.6 BOE 求解方法
既然 $V^*$ 是 $\mathcal{T}$ 的唯一不动点,自然的求解方法是值迭代:
\[V_{k+1}(s) \leftarrow \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma V_k(s')\bigr], \quad \forall s\]收敛速度:每次迭代误差缩小 $\gamma$ 倍,$k$ 步后误差 $\leq \gamma^k |V_0 - V^*|_\infty$。
若要误差 $< \varepsilon$,需要迭代次数 $k \geq \dfrac{\log(\varepsilon / |V_0 - V^*|_\infty)}{\log \gamma}$。
与期望方程求解的对比:
Bellman 期望方程:线性方程组
→ 解析解:(I - γP^π)^{-1} r^π (直接,但 O(n³))
→ 迭代解:策略评估(见 4.3 节)
Bellman 最优方程:非线性不动点方程
→ 无解析解(max 是非线性的)
→ 只能迭代:值迭代(见 4.6 节)
4.2.7 BOE 最优性:验证 $V^*$ 即为最优
命题:$V^$(BOE 的唯一解)等于所有策略中价值最大的值,即 $V^(s) = \max_\pi V^\pi(s)$。
证明思路(两个方向):
方向 1:$V^* \geq V^\pi$ 对所有策略 $\pi$
对任意策略 $\pi$,由 $V^\pi$ 满足 Bellman 期望方程:
\[V^\pi(s) = \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R} + \gamma V^\pi(s')\bigr] \leq \max_a \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R} + \gamma V^\pi(s')\bigr]\](加权平均 $\leq$ 最大值)
类比 $V^\pi$ 是算子 $\mathcal{T}$ 的次不动点 $V^\pi \leq \mathcal{T}(V^\pi)$,由单调性可得 $V^\pi \leq V^*$。
方向 2:存在策略 $\pi^$ 达到 $V^$
取贪心策略 $\pi^(s) = \arg\max_a Q^(s, a)$,可以验证 $V^{\pi^} = V^$(贪心策略实现了最优值)。
结论:
\[\boxed{V^*(s) = V^{\pi^*}(s) = \max_\pi V^\pi(s), \quad \pi^*(s) = \arg\max_a Q^*(s, a)}\]4.2.8 分析最优策略的结构
关键结论:
1. 最优策略是无记忆的(Markov):最优策略只需要当前状态 $s$,不需要历史轨迹。这是马尔可夫性带来的好处。
2. 最优策略是确定性的:对每个状态,选那个使 $Q^*$ 最大的唯一动作(若有并列则任选其一)。
3. 贪心即最优:给定 $Q^*$,简单的贪心选择就是全局最优——不需要提前规划多步。
直觉:为什么贪心就够?
因为 Q*(s,a) 已经把"从这步之后按最优行动"的所有未来奖励都算进去了。
所以此时此刻选 Q* 最大的动作,就等价于全局最优规划。
这也是为什么 Q-Learning(第6章)只要学好 Q*,
一步贪心就能得到最优策略,而不需要搜索。
V 与 Q 在最优时的关系:
\[V^*(s) = \max_a Q^*(s, a)\] \[Q^*(s, a) = \sum_{s'} \mathcal{P}(s'|s,a) \bigl[\mathcal{R}(s,a,s') + \gamma V^*(s')\bigr]\]期望方程 vs 最优方程完整对比:
| Bellman 期望方程 | Bellman 最优方程 | |
|---|---|---|
| 描述对象 | 给定策略 $\pi$ 的价值 | 最优价值(所有策略的上确界) |
| 动作处理 | $\sum_a \pi(a|s)$(加权平均) | $\max_a$(取最大) |
| 方程类型 | 线性 | 非线性(因 max) |
| 唯一解 | $V^\pi$(给定 $\pi$ 唯一) | $V^*$(压缩映射保证唯一) |
| 求解工具 | 矩阵求逆 / 策略评估迭代 | 值迭代 / 策略迭代 |
| 后续算法 | Actor-Critic、PPO(策略近似) | DQN、Q-Learning(Q* 近似) |
4.3 策略评估(Policy Evaluation)
问题:给定策略 $\pi$,如何计算 $V^\pi$?
方法:将 Bellman 期望方程作为迭代更新规则(同步更新):
\[V_{k+1}(s) \leftarrow \sum_a \pi(a|s) \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma V_k(s') \right]\]算法:策略评估
────────────────────────────────
初始化:V₀(s) = 0 对所有 s
循环 k = 0, 1, 2, ...:
对所有状态 s:
V_{k+1}(s) ← Σ_a π(a|s) Σ_{s'} P(s'|s,a)[R(s,a,s') + γV_k(s')]
if max_s|V_{k+1}(s) - V_k(s)| < ε:收敛,停止
返回 V^π ≈ V_k
收敛性:可以证明,上述迭代在 $\gamma < 1$ 时必然收敛到唯一的 $V^\pi$(Bellman 算子是压缩映射)。
4.4 策略改进
问题:已知 $V^\pi$,能否找到更好的策略?
贪心策略改进:
\[\pi'(s) = \arg\max_a Q^\pi(s, a) = \arg\max_a \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma V^\pi(s') \right]\]策略改进定理:对任意状态 $s$,$V^{\pi’}(s) \geq V^\pi(s)$。
证明思路:
\[V^{\pi'}(s) \geq Q^\pi(s, \pi'(s)) \geq Q^\pi(s, \pi(s)) = V^\pi(s)\]第一步不等式来自价值函数定义的展开,第二步来自贪心选择的定义。
4.5 策略迭代(Policy Iteration)
将策略评估与策略改进交替执行,直到收敛:
策略迭代算法
────────────────────────────────────────────────
初始化:随机策略 π₀
循环:
① 策略评估:计算 V^πₖ(迭代至收敛)
② 策略改进:πₖ₊₁(s) ← argmax_a Q^πₖ(s,a) 对所有 s
③ 若 πₖ₊₁ = πₖ:收敛,停止
返回 π* = πₖ
graph LR
A[随机初始策略 π₀] --> B[策略评估\n计算 V^π]
B --> C[策略改进\n贪心更新 π]
C --> D{π 是否改变?}
D -->|是| B
D -->|否| E[最优策略 π*]
收敛性:有限状态和动作空间下,策略迭代在有限步内收敛(策略空间有限,且每次严格改进)。
4.6 值迭代(Value Iteration)
策略迭代需要内循环运行策略评估至收敛,代价较高。值迭代将策略评估和改进合并为一步:
\[V_{k+1}(s) \leftarrow \max_a \sum_{s'} \mathcal{P}(s'|s,a) \left[ \mathcal{R}(s,a,s') + \gamma V_k(s') \right]\]值迭代算法
────────────────────────────────
初始化:V₀(s) = 0 对所有 s
循环 k = 0, 1, 2, ...:
对所有状态 s:
V_{k+1}(s) ← max_a Σ_{s'} P(s'|s,a)[R(s,a,s') + γV_k(s')]
if max_s|V_{k+1}(s) - V_k(s)| < ε:停止
输出最优策略:
π*(s) = argmax_a Σ_{s'} P(s'|s,a)[R(s,a,s') + γV*(s')]
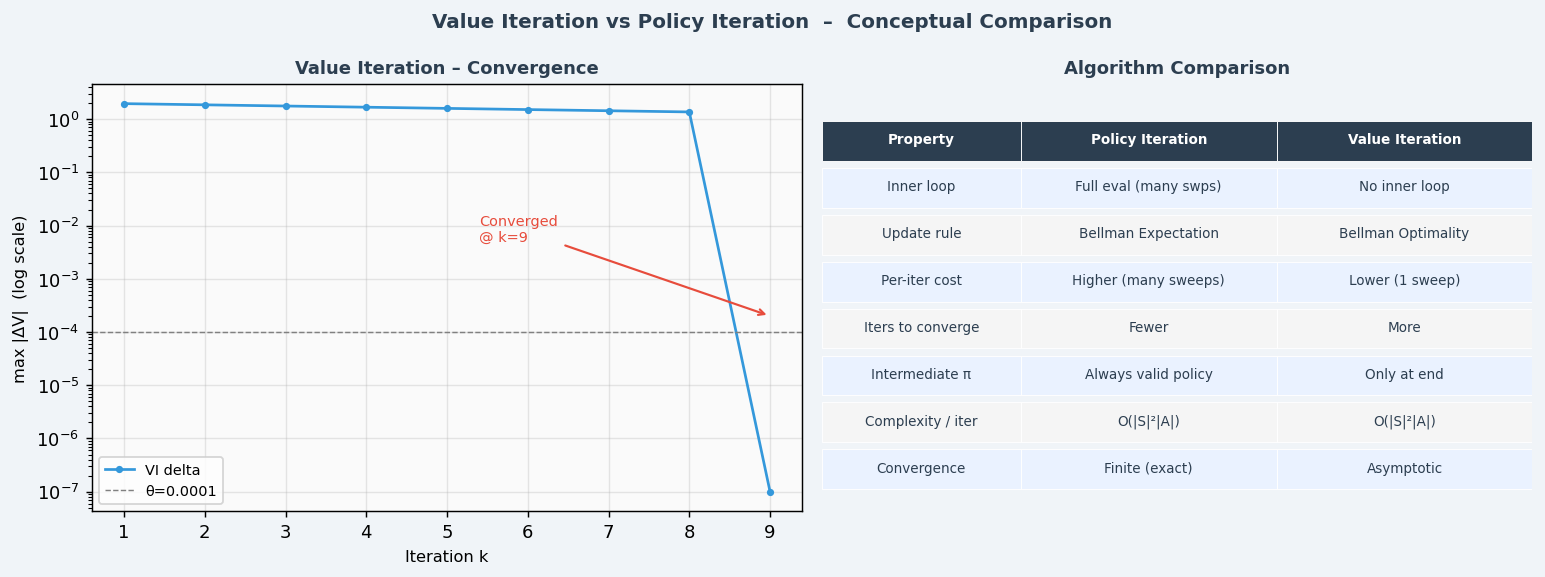
策略迭代 vs 值迭代:
┌────────────────┬─────────────────────┬─────────────────────┐
│ │ 策略迭代 │ 值迭代 │
├────────────────┼─────────────────────┼─────────────────────┤
│ 每次迭代 │ 策略评估+改进(慢) │ 一步更新(快) │
│ 收敛速度 │ 少迭代次数 │ 多迭代次数 │
│ 中间结果 │ 每轮都有完整策略 │ 最后才有策略 │
│ 实际效率 │ 通常更快 │ 简单实现 │
└────────────────┴─────────────────────┴─────────────────────┘
4.7 动态规划的局限:为什么需要无模型方法
动态规划有两个根本限制:
限制 1:需要完整的环境模型
| 需要知道 $\mathcal{P}(s’ | s,a)$ 和 $\mathcal{R}(s,a,s’)$——对真实机器人来说,这几乎不可能。 |
真实世界的动力学极其复杂:弹性碰撞、摩擦力变化、电机非线性……无法用解析模型精确描述。
限制 2:维度灾难(Curse of Dimensionality)
对连续状态空间(如机器人的 48 维关节状态),需要离散化。假设每维离散为 100 格:
\[|\mathcal{S}| = 100^{48} = 10^{96}\]这是一个比宇宙中原子数量还大的表格——根本无法存储和计算。
SLAM 中的类比:
占据栅格地图(Occupancy Grid):2D 空间 100m×100m, 分辨率 0.1m
→ 格子数 = 1000×1000 = 10⁶(勉强可行)
6自由度机器人关节状态 × 角速度:12维 × 100格/维
→ 10²⁴ 个状态(完全不可行)
解决方案:无模型方法(Model-Free RL)直接从采样经验中学习,用神经网络近似价值函数,回避了状态空间枚举的需求。
4.8 与 SLAM 图优化的对比
┌────────────────────────────────────────────────────────────┐
│ 动态规划 vs SLAM 图优化 │
├─────────────────────────┬──────────────────────────────────┤
│ 动态规划 │ SLAM 图优化 │
├─────────────────────────┼──────────────────────────────────┤
│ 目标:最优策略 π* │ 目标:最优位姿估计 x* │
│ 变量:V(s) 或 Q(s,a) │ 变量:位姿 x₁...xₙ │
│ 更新:Bellman 迭代 │ 更新:高斯-牛顿/LM 迭代 │
│ 收敛:值函数收敛 │ 收敛:残差收敛 │
│ 模型依赖:P(s'|s,a) │ 模型依赖:观测模型/运动模型 │
│ 维度灾难:状态空间爆炸 │ 维度灾难:大规模地图节点爆炸 │
└─────────────────────────┴──────────────────────────────────┘
两者共同本质:在约束(Bellman/图约束)下求解最优解
本章小结
动态规划核心公式:
Bellman 期望方程:V^π(s) = Σ_a π(a|s) Σ_{s'} P(s'|s,a)[R + γV^π(s')]
Bellman 最优方程:V*(s) = max_a Σ_{s'} P(s'|s,a)[R + γV*(s')]
两大算法:
策略迭代 = 策略评估(内循环) + 贪心策略改进(交替)
值迭代 = Bellman 最优算子的反复迭代
局限:
1. 需要知道环境模型 P(s'|s,a)
2. 状态空间连续时不可行(维度灾难)
→ 导出需求:无模型(Model-Free)+ 函数近似(Neural Network)
延伸阅读
- Sutton & Barto, Reinforcement Learning: An Introduction (2nd Ed.), Chapter 4 — 免费在线版
- Bellman, R. (1957). Dynamic Programming. Princeton University Press — 动态规划原始文献
- David Silver UCL Course, Lecture 3: Planning by Dynamic Programming — YouTube
延伸阅读2
用 LeetCode 上的动态规划(DP)题目来解释 Bellman 方程:强化学习其实就是动态规划的“概率升级版”。
选取最经典的 LeetCode 746. 使用最小花费爬楼梯 (Min Cost Climbing Stairs) 作为例子。这道题完美对应了 Bellman 方程中的“确定性环境”版本。
题目场景:最小花费爬楼梯
题目描述:
给你一个整数数组 cost ,其中 cost[i] 是从楼梯第 i 个台阶向上爬需要支付的费用。
- 你可以选择从下标为
0或1的台阶开始爬(初始花费为 0)。 - 每次你可以爬 1 个或 2 个台阶。
- 目标:求达到楼梯顶部(最后一个台阶之后)的最低花费。
输入示例: cost =
- 第 0 阶花费 10
- 第 1 阶花费 15
- 第 2 阶花费 20
第一部分:从 DP 到 Bellman 的映射
在动态规划中,我们通常定义一个 dp[i] 数组。
在强化学习(Bellman 方程)中,我们定义一个价值函数 V(s)。
它们的本质是一模一样的:
- DP 的
dp[i]:表示“到达第i阶(或者从第i阶出发)的最小花费”。 - Bellman 的
V(s):表示“处于状态s时,未来的期望回报(这里是负的花费)”。
1. 状态定义
我们定义 dp[i] 为:“如果你想从第 i 阶出发走到楼顶,所需要的最小花费”。
- 楼顶是终点,一旦到了楼顶,就不需要再花钱了,所以
dp[楼顶] = 0。
2. 状态转移方程(Bellman 方程的“马甲”)
在第 i 阶,你有两个选择(动作):
- 爬 1 阶:花费
cost[i],到达i+1阶。未来的花费是dp[i+1]。 - 爬 2 阶:花费
cost[i],到达i+2阶。未来的花费是dp[i+2]。
你要做最优决策(取最小值),所以方程是:
\[dp[i] = cost[i] + \min(dp[i+1], dp[i+2])\]这就是 Bellman 方程! 让我们把它翻译成强化学习的语言:
\[V(s) = \min_{a} \{ \underbrace{C(s, a)}_{\text{即时成本}} + \underbrace{V(s')}_{\text{下一状态价值}} \}\]- $s$ (当前状态):你在第
i阶。 - $a$ (动作):爬 1 阶 或 爬 2 阶。
- $C(s, a)$ (即时成本):
cost[i]。 - $s’$ (下一状态):
i+1或i+2。 - $\min$ (最优性原理):Bellman 方程的核心就是“最优策略包含最优子策略”,即我们要选那个让总花费最小的动作。
第二部分:图解计算过程
让我们用 cost = 来手动模拟这个“递推”过程。
注意:因为方程依赖未来(i+1),我们需要从后往前算(逆向递推)。
图示:
索引: 0 1 2 (3)
花费: 楼顶
状态: s0 s1 s2 s3
步骤 1:初始化边界条件
到达楼顶 s3 后,不需要再花钱了。
- $V(s3) = 0$ (即
dp = 0)
步骤 2:计算 s2 (第 2 阶)
你在 s2,花费是 20。
- 动作1(爬1阶):花费 20 + 到达 s3 的花费(0) = 20。
- 动作2(爬2阶):超出楼顶,视为到达 s3,花费 20 + 0 = 20。
- $V(s2) = 20 + \min(0, 0) = 20$
步骤 3:计算 s1 (第 1 阶)
你在 s1,花费是 15。
- 动作1(爬1阶):到达
s2。总花费 =cost+V(s2)= $15 + 20 = 35$。 - 动作2(爬2阶):到达
s3(楼顶)。总花费 =cost+V(s3)= $15 + 0 = 15$。 - 决策:显然爬 2 阶更划算。
- $V(s1) = \min(35, 15) = 15$
步骤 4:计算 s0 (第 0 阶)
你在 s0,花费是 10。
- 动作1(爬1阶):到达
s1。总花费 =cost+V(s1)= $10 + 15 = 25$。 - 动作2(爬2阶):到达
s2。总花费 =cost+V(s2)= $10 + 20 = 30$。 - 决策:爬 1 阶更划算。
- $V(s0) = \min(25, 30) = 25$
最终结果: 题目允许从 0 或 1 开始,所以答案是 $\min(V(s0), V(s1)) = \min(25, 15) = 15$。
第三部分:代码实现
这段代码完全体现了 Bellman 方程的迭代求解思想。
def minCostClimbingStairs(cost):
# 1. 定义状态数组
# 长度是 cost.length + 1,因为我们要算到“楼顶”那个位置
# dp[i] 表示:从第 i 阶出发到楼顶的最小花费
dp = * (len(cost) + 1)
# 2. 逆向递推 (Bellman 方程的核心:利用已知求未知)
# 我们从倒数第一阶开始算,一直算到第 0 阶
for i in range(len(cost) - 1, -1, -1):
# 3. 状态转移方程
# 当前花费 + min(下一步的花费, 下两步的花费)
dp[i] = cost[i] + min(dp[i+1], dp[i+2])
# 4. 最终决策
# 可以从 0 或 1 开始,取最小值
return min(dp, dp)[[source_group_web_4]]
# 测试
cost =
print(minCostClimbingStairs(cost)) # 输出: 15
第四部分:升华——从 DP 到强化学习
通过这道题,其实已经掌握了 Bellman 方程的精髓。那么强化学习(RL)里的 Bellman 方程多了什么?
多了“概率”和“期望”。
-
LeetCode DP (确定性): 你决定爬 1 阶,就一定会到下一阶。 \(V(s) = \min ( R + V(s') )\)
-
强化学习 Bellman (随机性): 假设地面很滑,你决定爬 1 阶,有 80% 概率成功,20% 概率滑倒原地不动。 这时候你就不能只算一条路了,你要算期望。
\[V(s) = R + (\gamma \cdot [ 0.8 \times V(s_{成功}) + 0.2 \times V(s_{原地}) ])\]
总结: LeetCode 的 DP 题是 Bellman 方程在环境完全已知且确定时的特例。
- DP 是在解一个确定的递推数列。
- Bellman 方程 是在解一个包含概率分布的函数方程。
理解了爬楼梯的 dp[i] = cost[i] + min(...),就理解了强化学习中“当前价值 = 即时奖励 + 折扣后的未来价值”这一核心逻辑。