目标:用神经网络代替查找表,迈入现代深度 RL 的大门。理解 DQN 引入的两个关键稳定性技巧,以及整个 DQN 家族的演进。
7.1 值函数近似的动机
上一章我们遇到了表格型方法的瓶颈:连续/高维状态空间无法用表格存储。
函数近似的思想:不再为每个状态单独记一个值,而是用参数化函数来近似:
\[V_\theta(s) \approx V^\pi(s), \quad Q_\theta(s, a) \approx Q^\pi(s, a)\]其中 $\theta$ 是神经网络的参数。
好处:
- 状态空间可以是连续的、高维的
- 泛化能力:相似的状态会得到相似的估计(神经网络的插值特性)
- 参数数量远少于状态数量:压缩表示
表格 Q-Learning: Q 表:|S| × |A| 个数值
机器人:10⁴⁸ × 10¹² → 不可能
深度 Q-Learning: Q 网络:输入 s(48维) → 输出 Q(a₁,...,aₖ)
参数:~数十万,完全可行
7.2 线性函数近似
最简单的函数近似:特征向量的线性组合。
\[V_\theta(s) = \theta^\top \phi(s) = \sum_j \theta_j \phi_j(s)\]其中 $\phi(s)$ 是人工设计的状态特征向量(如径向基函数、傅里叶特征等)。
优点:理论分析简洁,有收敛保证
缺点:特征工程依赖领域知识,表达能力有限
7.3 深度神经网络作为 Q 函数近似器
两种网络结构:
结构 1:(s, a) 作为输入,输出单个 Q 值
s ──┐
├─► 网络 ─► Q(s, a) ← 连续动作空间或单个 Q 值
a ──┘
结构 2:s 作为输入,输出所有动作的 Q 值(向量)
s ──► 网络 ─► [Q(s,a₁), Q(s,a₂), ..., Q(s,aₙ)] ← 离散动作空间
一次前向传播得到所有 Q
DQN 使用结构 2(Atari 游戏有离散动作):给定状态,输出每个动作的 Q 值,贪心选最大值。
7.4 半梯度(Semi-Gradient)下降
为什么 RL 中的梯度更新比监督学习复杂?
监督学习中,目标 $y$ 是固定的(标签):
\[L = \frac{1}{2}(Q_\theta(s,a) - y)^2, \quad \nabla_\theta L = (Q_\theta(s,a) - y) \nabla_\theta Q_\theta(s,a)\]RL 中,TD 目标 $y = r + \gamma \max_{a’} Q_\theta(s’, a’)$ 依赖于参数 $\theta$:
\[L = \frac{1}{2}(Q_\theta(s,a) - \underbrace{(r + \gamma \max_{a'} Q_\theta(s', a'))}_{\text{目标也含 } \theta})^2\]如果对整个损失求梯度(包括目标中的 $\theta$),训练会极不稳定。
Semi-Gradient 的处理:将目标视为常数(停止梯度):
\[y \leftarrow r + \gamma \max_{a'} Q_\theta(s', a') \quad \text{(stop gradient)}\] \[\nabla_\theta L = (Q_\theta(s,a) - y) \cdot \nabla_\theta Q_\theta(s,a)\]这是”半梯度”的含义——只对当前 Q 求梯度,不对目标 Q 求梯度。
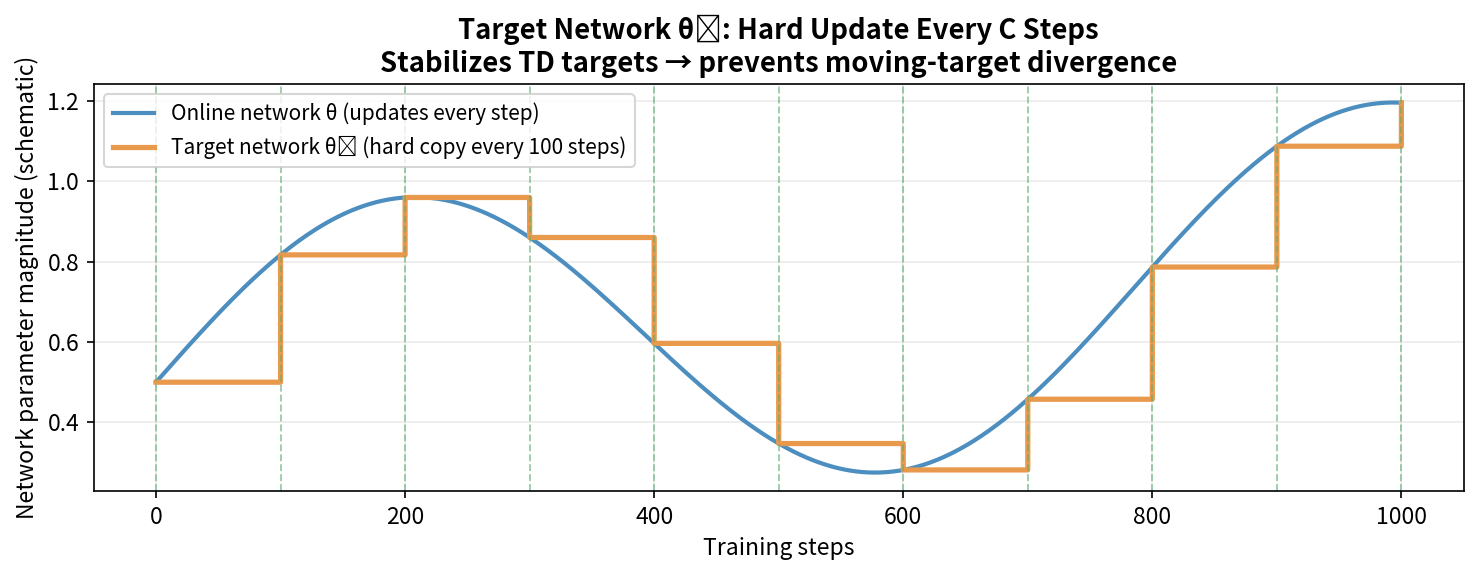
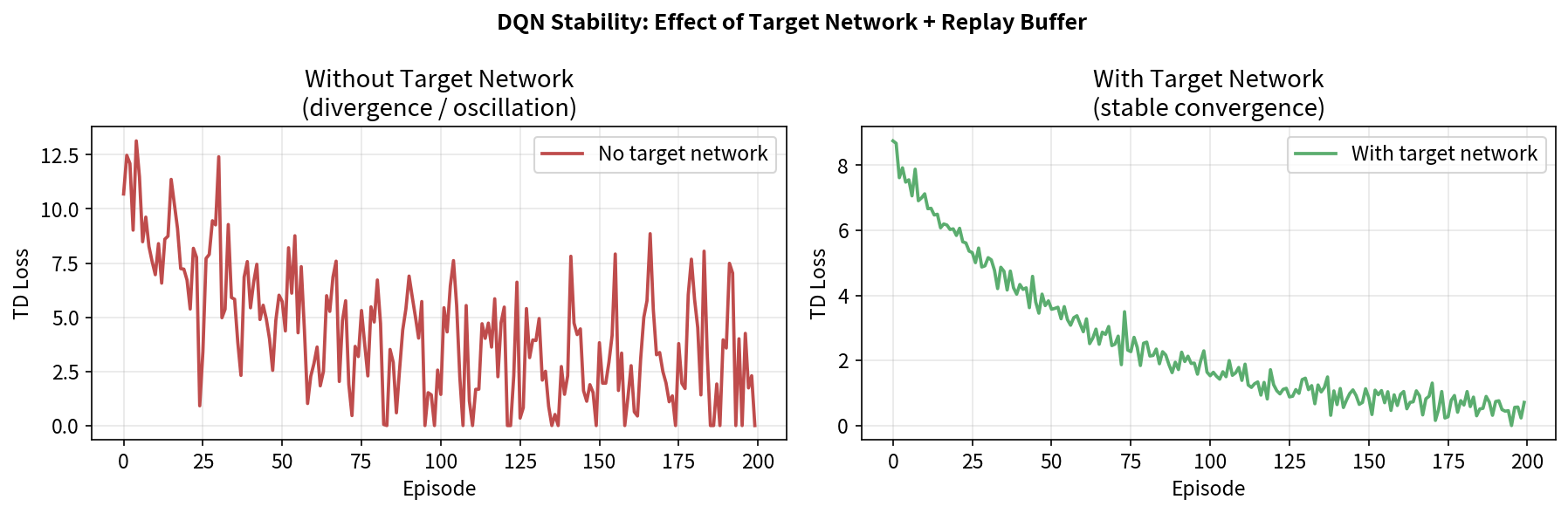
7.5 目标网络(Target Network):训练稳定的关键
问题:追逐移动的靶子
即使用了 Semi-Gradient,每次更新 $\theta$ 后,TD 目标 $y = r + \gamma \max_{a’} Q_\theta(s’, a’)$ 也会随之改变。这就像在追一个不断移动的目标——网络可能陷入振荡,无法收敛。
类比:SLAM 中如果参考帧一直变化,位姿优化会不收敛;需要固定的锚点。
目标网络的解决方案
维护两个网络:
- 在线网络(Online Network)$Q_\theta$:正常更新,用于计算当前 Q 值
- 目标网络(Target Network)$Q_{\theta^-}$:参数延迟更新,用于计算 TD 目标
在线网络 θ:每步用梯度下降更新
目标网络 θ⁻:每 C 步从在线网络复制一次(C=1000~10000)
时间线:
step 1-999:θ 正常更新,θ⁻ 不动
step 1000:θ⁻ ← θ (硬更新)
step 1001-1999:θ 正常更新,θ⁻ 不动
...
软更新(Polyak 平均,SAC等算法常用):
θ⁻ ← τθ + (1-τ)θ⁻ (每步微小更新,τ=0.005)
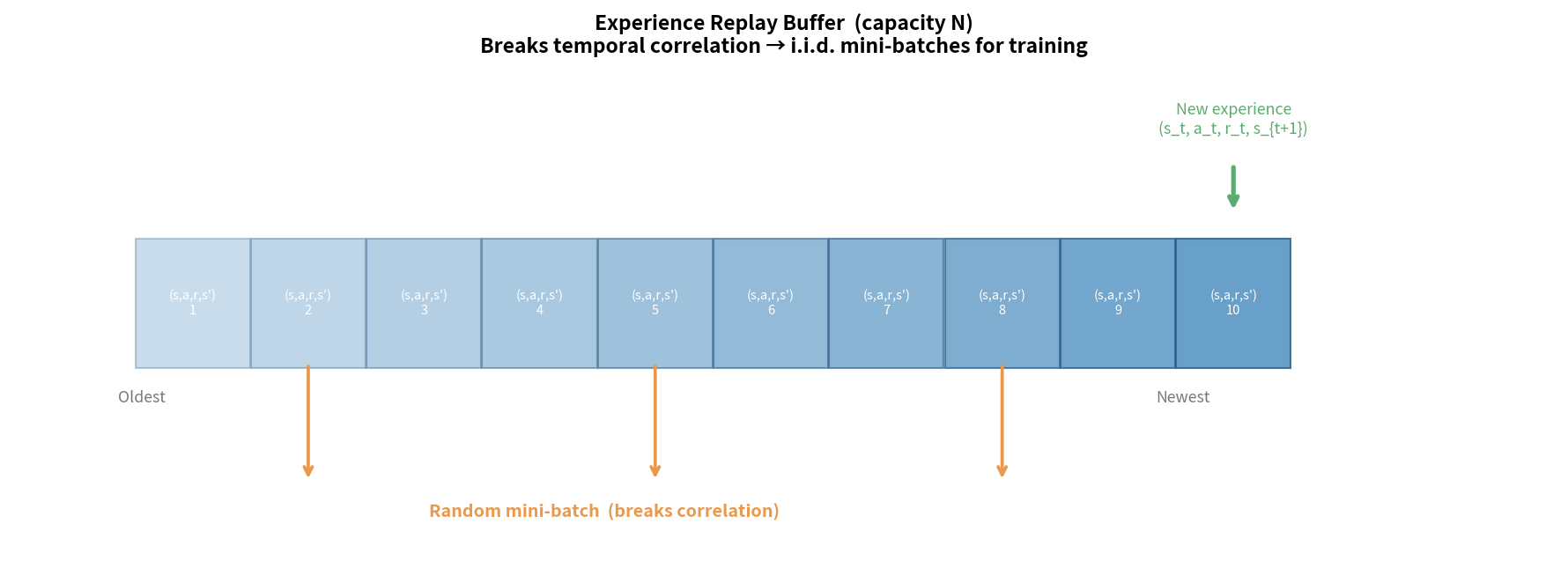
7.6 经验回放(Experience Replay):打破时序相关性
问题:时序相关导致训练不稳定
在线采集的轨迹数据是时序相关的——$s_t, s_{t+1}, s_{t+2}$ 高度相关,不满足监督学习中 i.i.d. 假设:
时间序列数据相关性示例:
t=0: 左脚抬起
t=1: 重心前移
t=2: 右脚落地
t=3: 身体前倾
这些样本高度相关!直接训练 → 梯度估计偏差很大 → 不稳定
经验回放缓冲区(Replay Buffer)
维护一个容量为 $N$ 的缓冲区,存储历史转移 $(s, a, r, s’, \text{done})$:
Replay Buffer(容量 N = 1,000,000):
┌──────────────────────────────────────┐
│ (s₁,a₁,r₁,s₂) │
│ (s₂,a₂,r₂,s₃) │
│ (s₃,a₃,r₃,s₄) ← 存储历史经验 │
│ ... │
│ (sₙ,aₙ,rₙ,sₙ₊₁) │
└──────────────────────────────────────┘
↓ 随机采样 B 条(batch)
↓ 从 batch 中计算梯度,打破时序相关性
双重好处:
- 打破相关性:随机采样使数据接近 i.i.d.
- 数据复用:每条经验可被多次使用,提升样本效率
代价:经验回放要求算法是 Off-Policy 的(数据可以来自旧策略),这是为什么 DQN 用 Q-Learning 而非 Sarsa。
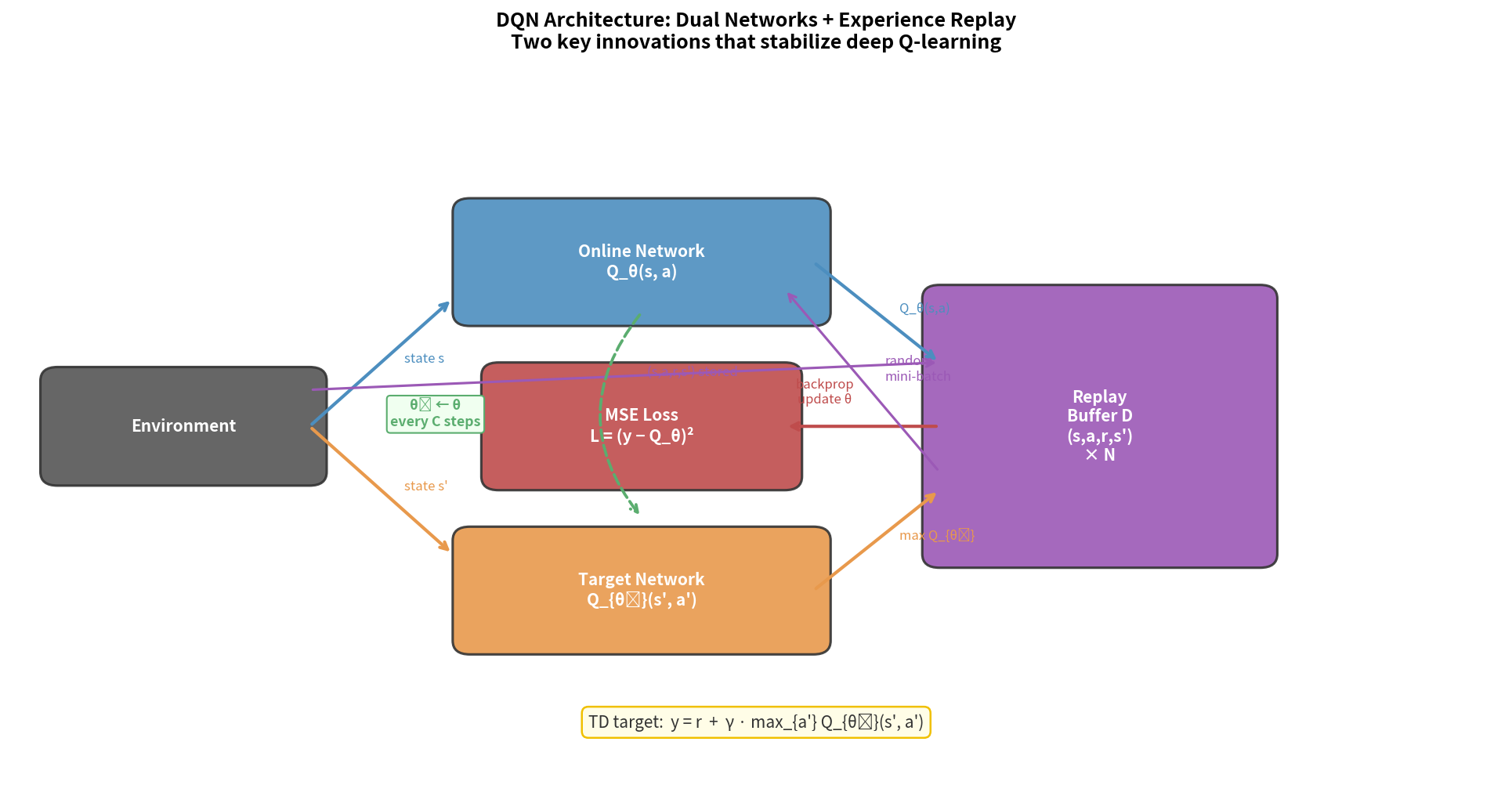
7.7 DQN 完整算法
DeepMind 2013/2015 年的 DQN 论文将深度神经网络、经验回放、目标网络结合,在 Atari 游戏上超越了人类水平。
双网络架构全景
DQN 的核心是在线网络与目标网络的解耦,配合经验回放实现稳定训练:
DQN 算法伪代码
DQN 算法(Mnih et al., 2015)
────────────────────────────────────────────────────────────
初始化:
在线网络 Q_θ(随机参数)
目标网络 Q_{θ⁻} ← θ⁻ = θ
Replay Buffer D(容量 N)
循环 episode = 1, ..., M:
获取初始状态 s₁(Atari: 4帧像素灰度图)
循环 t = 1, ..., T:
① 选动作:a_t ← ε-greedy(Q_θ(s_t,:))
② 执行 a_t,获得 r_t, s_{t+1}
③ 存入缓冲区:D ← D ∪ {(s_t, a_t, r_t, s_{t+1})}
④ 采样 mini-batch:{(sⱼ,aⱼ,rⱼ,sⱼ')} ~ D
⑤ 计算 TD 目标:
yⱼ = rⱼ 若 sⱼ' 是终止状态
yⱼ = rⱼ + γ max_{a'} Q_{θ⁻}(sⱼ',a') 否则
⑥ 梯度下降:最小化 L = Σⱼ (Q_θ(sⱼ,aⱼ) - yⱼ)²
⑦ 每 C 步更新目标网络:θ⁻ ← θ
DQN 的网络结构(Atari 版本)
输入:4×84×84 灰度像素帧(4帧堆叠)
↓
Conv2D(32, 8×8, stride=4) + ReLU
↓
Conv2D(64, 4×4, stride=2) + ReLU
↓
Conv2D(64, 3×3, stride=1) + ReLU
↓
Flatten → Linear(512) + ReLU
↓
Linear(|A|) ← 输出每个动作的 Q 值
7.8 DQN 改进家族
Double DQN(van Hasselt et al., 2016)
将 Double Q-Learning 的思想用于 DQN,消除 Q 值高估:
\[y = r + \gamma Q_{\theta^-}\left(s', \arg\max_{a'} Q_\theta(s', a')\right)\]- 用在线网络 $\theta$ 选动作(argmax)
- 用目标网络 $\theta^-$ 评估价值
论文:Deep Reinforcement Learning with Double Q-learning — arXiv:1509.06461
GitHub:google-deepmind/dqn
Dueling DQN(Wang et al., 2016)
将 Q 函数分解为状态价值 $V(s)$ 和优势函数 $A(s,a)$:
\[Q(s, a) = V(s) + A(s, a) - \frac{1}{|A|}\sum_{a'} A(s, a')\]普通 DQN 网络:
特征 → Q(s,a₁), Q(s,a₂), ..., Q(s,aₙ)
Dueling 网络:
┌→ V(s) [标量] ← 这个状态有多好
特征 ─────┤
└→ A(s,a₁)...A(s,aₙ) ← 每个动作相对好多少
↓
Q(s,a) = V(s) + A(s,a) - mean(A)
优势:网络可以在不需要区分动作时,专注于学习 $V(s)$(许多状态下,动作的选择影响不大)。
论文:Dueling Network Architectures for Deep Reinforcement Learning — arXiv:1511.06581
Prioritized Experience Replay(Schaul et al., 2016)
不均匀地从 Replay Buffer 采样:TD 误差大的样本被更频繁地采样。
\[P(i) = \frac{|δ_i|^α}{\sum_j |δ_j|^α}\]直觉:TD 误差大的样本说明预测偏差大,”更值得学习”。
论文:Prioritized Experience Replay — arXiv:1511.05952
Rainbow DQN(Hessel et al., 2018)
将上述所有改进(+多步 TD + 分布式 RL + 噪声网络)组合,达到 Atari SOTA。
论文:Rainbow: Combining Improvements in Deep Reinforcement Learning — arXiv:1710.02298
DQN 算法族演进图
graph TD
A[Q-Learning\n1989] --> B[DQN\n2013/2015]
B --> C[Double DQN\n2016]
B --> D[Dueling DQN\n2016]
B --> E[Prioritized Replay\n2016]
C --> F[Rainbow\n2018]
D --> F
E --> F
B --> G[分布式 RL\nC51/QR-DQN]
G --> F
本章小结
DQN 的两大核心创新:
1. 目标网络:固定目标,稳定训练(每 C 步才更新)
2. 经验回放:打破时序相关,数据复用
RL 训练不稳定的根源:
- 目标随参数变动(追移动靶)→ 目标网络
- 数据时序相关(非i.i.d.)→ 经验回放
- Q 值高估(max 偏差)→ Double DQN
DQN 的适用范围:
✓ 离散动作空间(Atari游戏、格子世界)
✗ 连续动作空间(机器人控制)→ 需要 Actor-Critic
延伸阅读
- Mnih et al. (2015). Human-level control through deep reinforcement learning. Nature — DQN 原始论文 — arXiv:1312.5602
- 官方 DQN 代码:google-deepmind/dqn(Lua/Torch)
- 高质量 PyTorch 实现:pytorch/tutorials - DQN
- van Hasselt et al. (2016). Deep Reinforcement Learning with Double Q-learning — arXiv:1509.06461
- Wang et al. (2016). Dueling Network Architectures — arXiv:1511.06581
- Hessel et al. (2018). Rainbow — arXiv:1710.02298