目标:当环境模型未知时,学会从”经验”中学习价值函数。本章是无模型 RL 的基础,MC 和 TD 的思想贯穿所有现代算法。
5.1 无模型方法的动机
动态规划的核心限制是需要知道 $\mathcal{P}(s’ \vert s,a)$。现实中,我们往往:
- 不知道机器人关节动力学的精确模型
- 不知道地形的摩擦系数分布
- 不知道真实电机的非线性响应曲线
无模型方法的思路:直接与环境交互,从采样的轨迹(而非模型)中估计价值函数。
有模型 DP: 已知 P(s'|s,a) → 用数学期望精确计算 V
无模型方法: 不知道 P → 用实际采样的轨迹来估计 V
就像积分的蒙特卡洛近似:
∫f(x)dx ≈ (1/N) Σᵢ f(xᵢ),xᵢ 从 p(x) 中采样
5.2 蒙特卡洛(MC)方法
核心思想
直接用实际回报估计价值函数。 跑完整个 Episode,用实际获得的累积奖励 $G_t$ 来更新 $V(s_t)$。
\[V(s) \approx \text{average}\{G_t : s_t = s\}\]大数定律保证:样本足够多时,样本均值收敛到真实期望值。
首访 MC(First-Visit MC)
每个 Episode 中,只使用状态 $s$ 第一次出现时的 $G_t$ 来更新:
算法:首访 MC 策略评估
────────────────────────────────────────────
初始化:V(s) = 0, Returns(s) = [] 对所有 s
对每个 Episode:
生成轨迹:s₀,a₀,r₀, s₁,a₁,r₁, ..., s_T
G ← 0
从 t=T-1 到 0(反向遍历):
G ← γG + r_t
若 sₜ 在 s₀...sₜ₋₁ 中未出现(首访):
Returns(sₜ).append(G)
V(sₜ) ← mean(Returns(sₜ))
增量更新形式(等价,更常用):
\[V(s_t) \leftarrow V(s_t) + \alpha \left[ G_t - V(s_t) \right]\]其中 $\alpha$ 是步长(学习率)。
直觉:$G_t - V(s_t)$ 是”预测误差”——实际回报比预测的高,就把 $V$ 调高;低就调低。
5.3 MC 的特性分析
优点:
✓ 不需要环境模型
✓ 无偏估计:G_t 是 V^π(s) 的无偏估计
✓ 不依赖于 Markov 假设(只用终止回报)
缺点:
✗ 需要等到 Episode 结束才能更新
✗ 方差高:G_t = r_t + γr_{t+1} + ... 是多个随机变量之和
✗ 不适用于连续任务(无终止状态)
方差来源:$G_t$ 是整条轨迹的奖励总和,轨迹中每一步的随机性都会贡献到方差中:
\[\text{Var}[G_t] = \text{Var}[r_t + \gamma r_{t+1} + \gamma^2 r_{t+2} + \cdots]\]每多一步,方差就多一项。长轨迹的 MC 估计方差会非常高。
5.4 时序差分(TD)学习:TD(0)
TD 学习是 RL 中最重要的思想之一,由 Sutton (1988) 提出。
核心思想:用”预测的预测”来学习
MC 等到真实回报 $G_t$(等到 Episode 结束),TD 则用下一步的价值估计来立即更新:
\[V(s_t) \leftarrow V(s_t) + \alpha \left[ \underbrace{r_t + \gamma V(s_{t+1})}_{\text{TD 目标}} - V(s_t) \right]\]TD 误差(TD Error):
\[\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)\]MC 目标: G_t = r_t + γr_{t+1} + γ²r_{t+2} + ... + γᵀrᵀ (真实回报,等到结束)
TD(0) 目标: r_t + γV(s_{t+1}) (用估计替代未来)
这种”用一个估计更新另一个估计”的思想叫做自举(Bootstrapping)——用靴带提起自己。
算法:TD(0) 策略评估
────────────────────────────────────────────
初始化:V(s) = 0 对所有 s
对每个 Episode:
初始化 s ← 初始状态
循环直到终止:
a ← π(s)(按策略选动作)
执行 a,观测 r, s'
V(s) ← V(s) + α[r + γV(s') - V(s)] ← 核心更新
s ← s'
5.5 TD 误差的直觉:”时间上的预测误差”
TD 误差 $\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)$ 是一个神奇的信号:
δ_t > 0 :"比预期好!"——事情比我想象的顺利
→ V(s_t) 应该提高
δ_t < 0 :"比预期差!"——事情比我想象的糟糕
→ V(s_t) 应该降低
δ_t = 0 :"完全符合预期"——价值函数已经准确
神经科学联系:多巴胺神经元的激发模式与 TD 误差惊人地相似——这不是巧合,而是 RL 与神经科学的深层联系。当结果”好于预期”时多巴胺激增,”差于预期”时减少,这正是 TD 误差的生物学对应。
5.6 MC vs TD vs DP 三角对比
三种方法都在估计 $V^\pi(s)$,但采用了不同的策略:
完整备份
(对所有 s' 求和)
│
│
DP(需要模型)
│
┌───────────────┼───────────────┐
│ │ │
深度 │ 浅度
(完整轨迹) │ (单步)
│ │ │
MC │ TD(0)
(不需要模型) │ (不需要模型)
│ │ │
└───────────────┼───────────────┘
│
采样备份
(从真实交互采样)
| 方法 | 需要模型 | 需要完整 Episode | 偏差 | 方差 | Bootstrapping |
|---|---|---|---|---|---|
| DP | ✓ | ✗ | 无 | 无 | ✓ |
| MC | ✗ | ✓ | 无 | 高 | ✗ |
| TD | ✗ | ✗ | 有 | 低 | ✓ |
MC 无偏:$G_t$ 是 $V^\pi(s_t)$ 的无偏估计(期望等于真值)
TD 有偏:$r_t + \gamma V(s_{t+1})$ 用了不准确的 $V(s_{t+1})$,引入偏差(但随着训练进行,偏差减小)
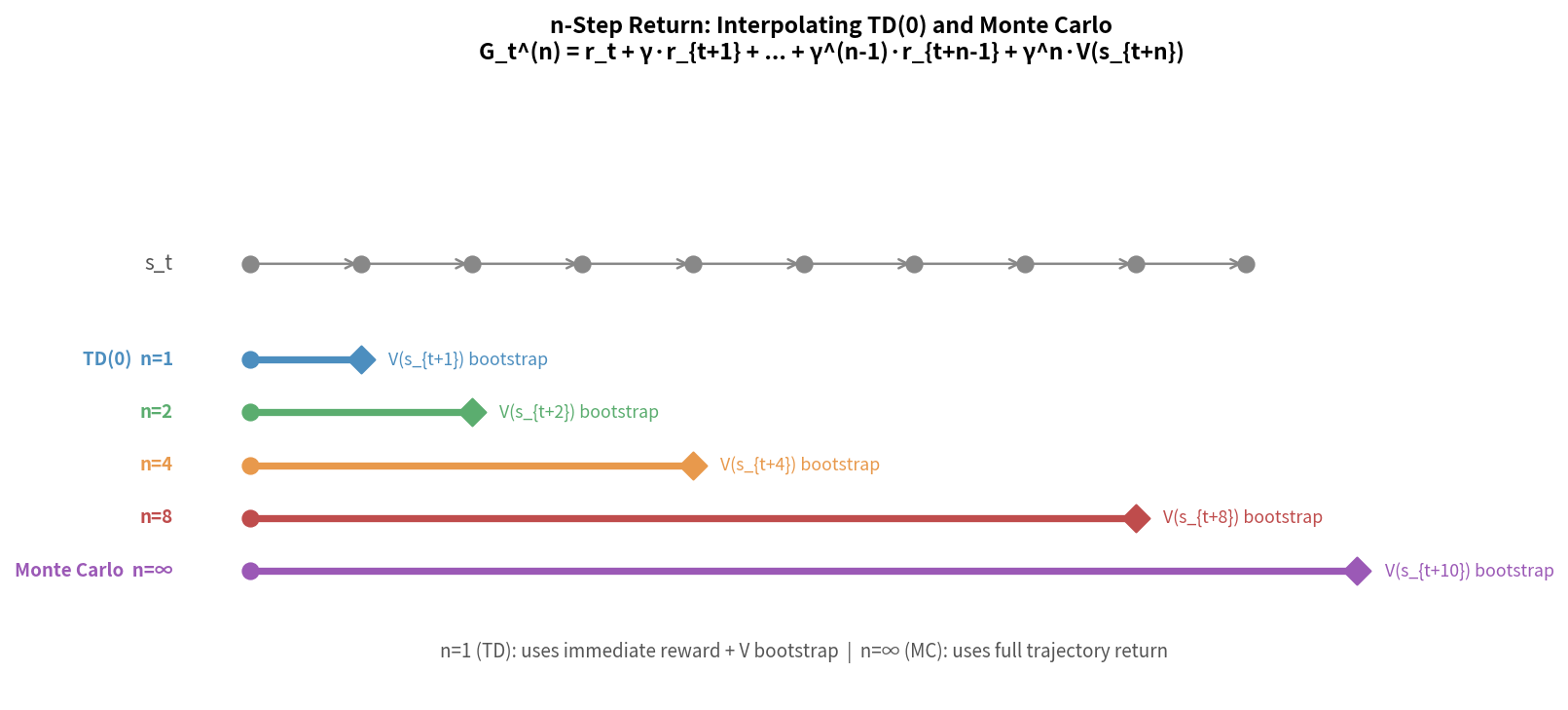
5.7 n-step TD:连接 MC 与 TD
n-step TD 是 MC(无限步)和 TD(0)(单步)之间的连续谱:
\[G_t^{(n)} = r_t + \gamma r_{t+1} + \cdots + \gamma^{n-1} r_{t+n-1} + \gamma^n V(s_{t+n})\]n=1: G^(1) = r_t + γV(s_{t+1}) ← TD(0)
n=2: G^(2) = r_t + γr_{t+1} + γ²V(s_{t+2})
n=∞: G^(∞) = r_t + γr_{t+1} + ... ← MC
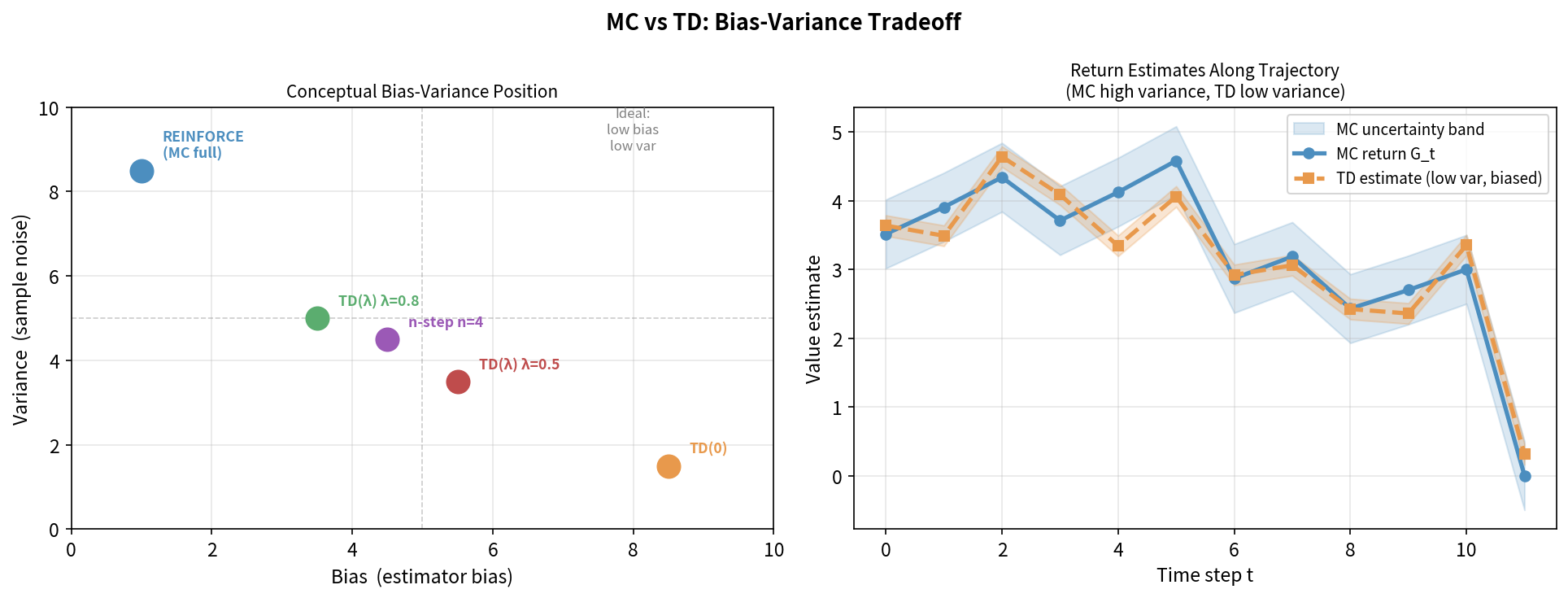
n↑ → 偏差↓, 方差↑
n↓ → 偏差↑, 方差↓
n 的选择是偏差-方差权衡的旋钮,这个思想在 GAE(第9章)中得到精细化。
5.8 TD(λ) 与资格迹
TD(λ) 用资格迹(Eligibility Traces) 对所有 n-step 回报做加权平均,权重按 λ 指数衰减:
\[G_t^\lambda = (1-\lambda) \sum_{n=1}^{\infty} \lambda^{n-1} G_t^{(n)}\]λ=0:等价于 TD(0)(只用 1-step 回报)
λ=1:等价于 MC(所有步的回报均等权重)
λ∈(0,1):加权平均,近期步权重更高
在线实现:资格迹向量 $\mathbf{e}_t$
\[\mathbf{e}_t = \gamma \lambda \mathbf{e}_{t-1} + \nabla_\theta V_\theta(s_t)\] \[\theta \leftarrow \theta + \alpha \delta_t \mathbf{e}_t\]资格迹记录了”哪些状态对当前 TD 误差负有责任”,使得信用分配更高效。
可视化:不同算法的学习曲线
价值估计误差
高│ MC
│ \
│ \──────MC(噪声大,方差高)
│ \
│ \
低│ ╲____TD(偏差小但更稳定)
│ ─────────────────
└─────────────────────────────► 训练轮数
MC:最终收敛到无偏估计,但收敛慢且噪声大
TD:更快收敛,但有初期偏差(随训练减小)
TD(λ):在二者之间,λ 调节偏差-方差平衡
本章小结
无模型预测的三个层次:
DP → 需要模型,精确计算
TD → 单步 Bootstrap,在线学习,低方差
MC → 完整轨迹,离线更新,无偏但高方差
核心公式:
TD(0): V(s) ← V(s) + α[r + γV(s') - V(s)]
TD 误差: δ = r + γV(s') - V(s)
后续章节中:
TD 误差 δ → Q-Learning、DQN 的核心更新(第6、7章)
TD(λ)/GAE → PPO 的优势估计(第9、10章)