目标:理解 Actor-Critic 如何结合策略梯度(低偏差)和 TD 学习(低方差),推导 A2C、GAE,为 PPO 打好基础。
9.1 REINFORCE 的根本问题
REINFORCE 用 Monte Carlo 回报 $G_t$ 来估计优势:
\[\nabla_\theta J \approx \sum_t \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot G_t\]高方差:$G_t$ 是整条轨迹的随机累积奖励,噪声大,需要大量样本。
根本矛盾:
MC 估计(REINFORCE):无偏,但高方差,需要完整轨迹
TD 估计: 有偏,但低方差,可以在线更新
Actor-Critic = 策略梯度(Actor)+ TD 价值估计(Critic)
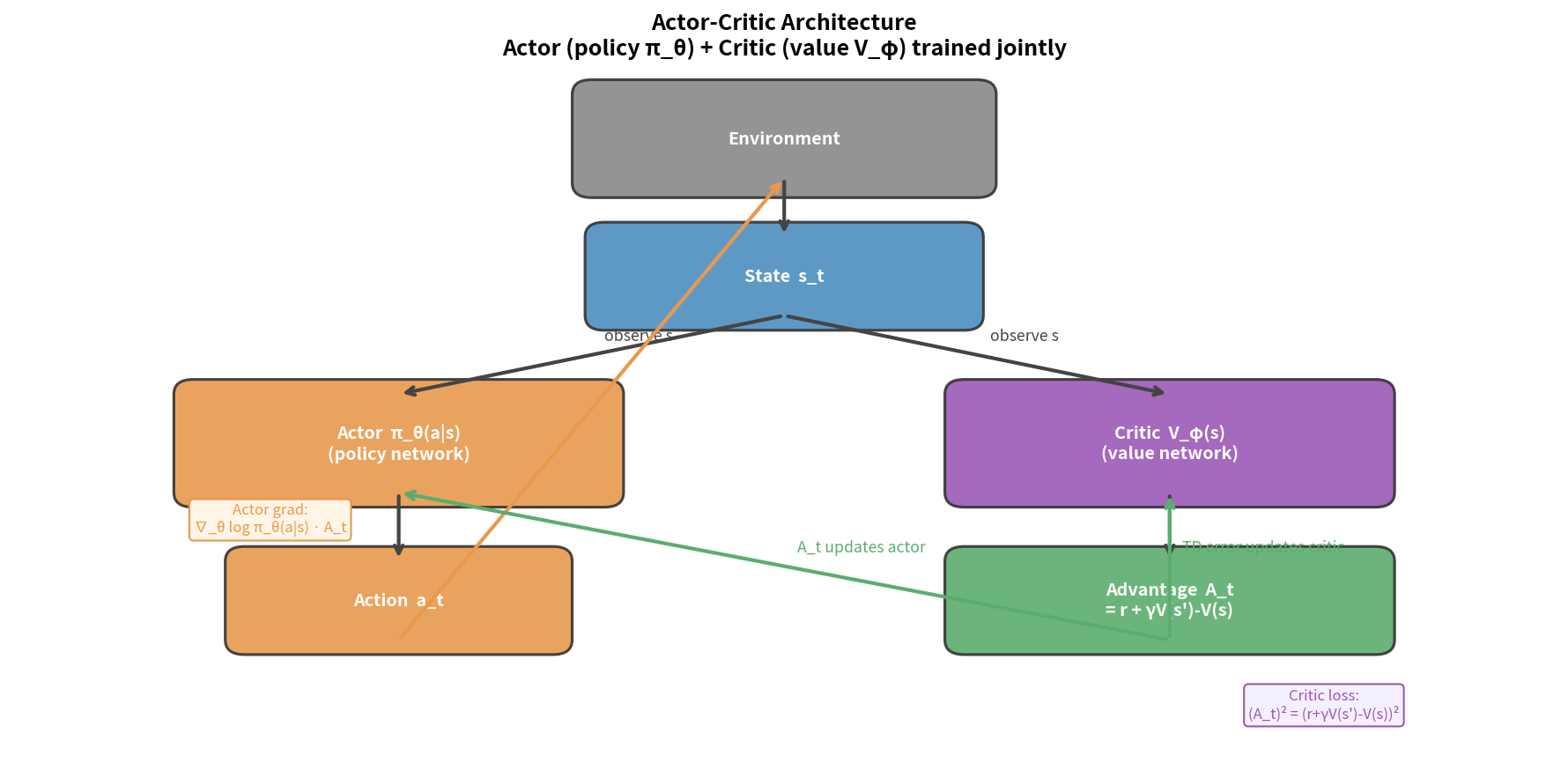
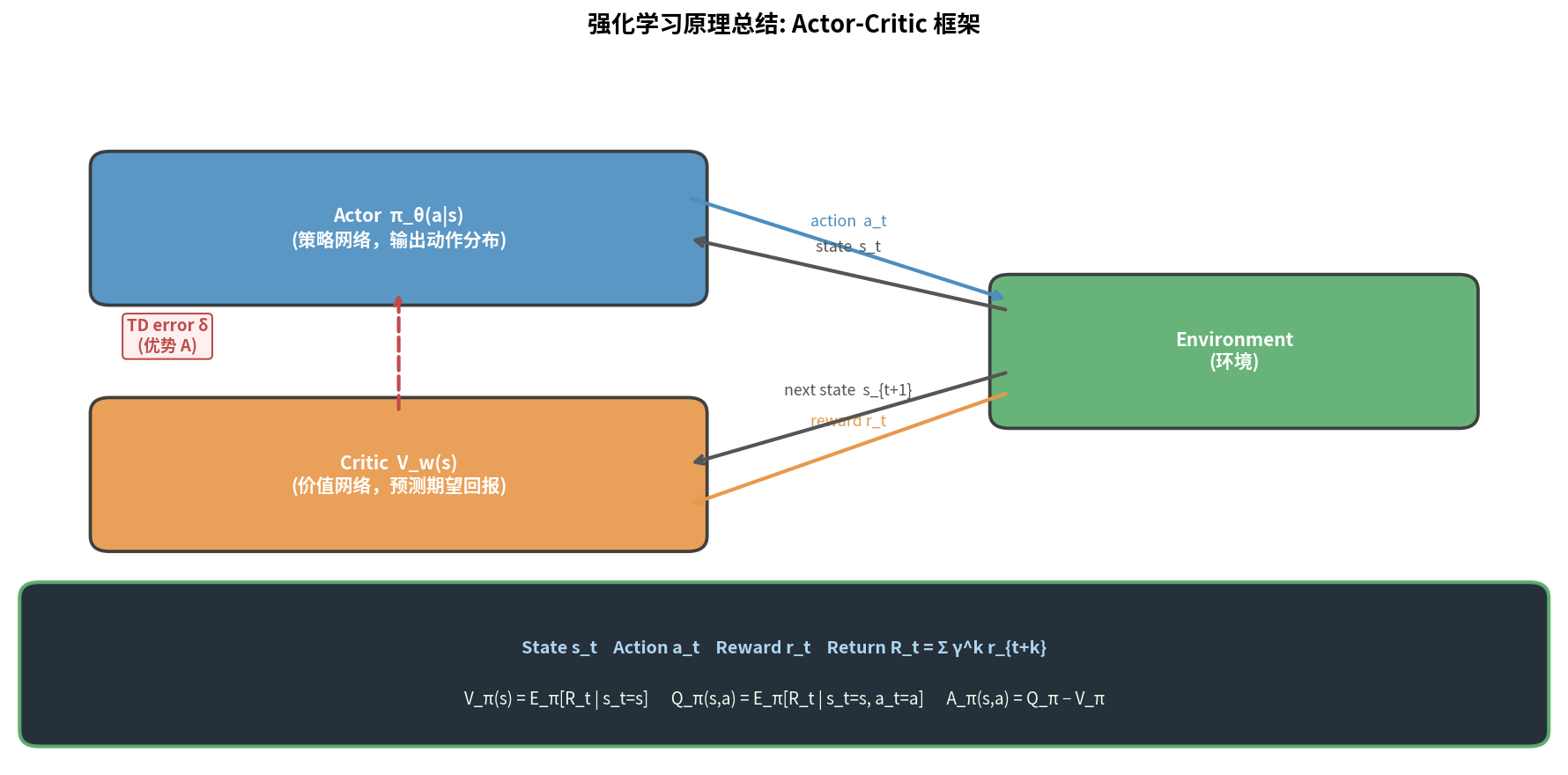
9.2 Actor-Critic 的基本框架
两个组件:
┌─────────────────────────────────────────────────┐
│ Actor-Critic │
│ │
│ Actor(演员) π_θ(a|s) │
│ ├── 输出动作分布 │
│ └── 由 Critic 的评估信号来更新 │
│ │
│ Critic(评论家)V_w(s) 或 Q_w(s,a) │
│ ├── 估计价值函数 │
│ └── 为 Actor 提供基线/优势估计 │
└─────────────────────────────────────────────────┘
graph LR
E[环境] -->|state s| A[Actor π_θ]
E -->|state s| C[Critic V_w]
A -->|action a| E
E -->|reward r, next state s'| C
C -->|TD error δ| A
C -->|δ → 更新 w| C
A -->|∇_θ log π · δ → 更新 θ| A
关键思想:Critic 用 TD 误差 $\delta_t = r_t + \gamma V_w(s_{t+1}) - V_w(s_t)$ 替代 MC 回报 $G_t$ 来指导 Actor 的更新。
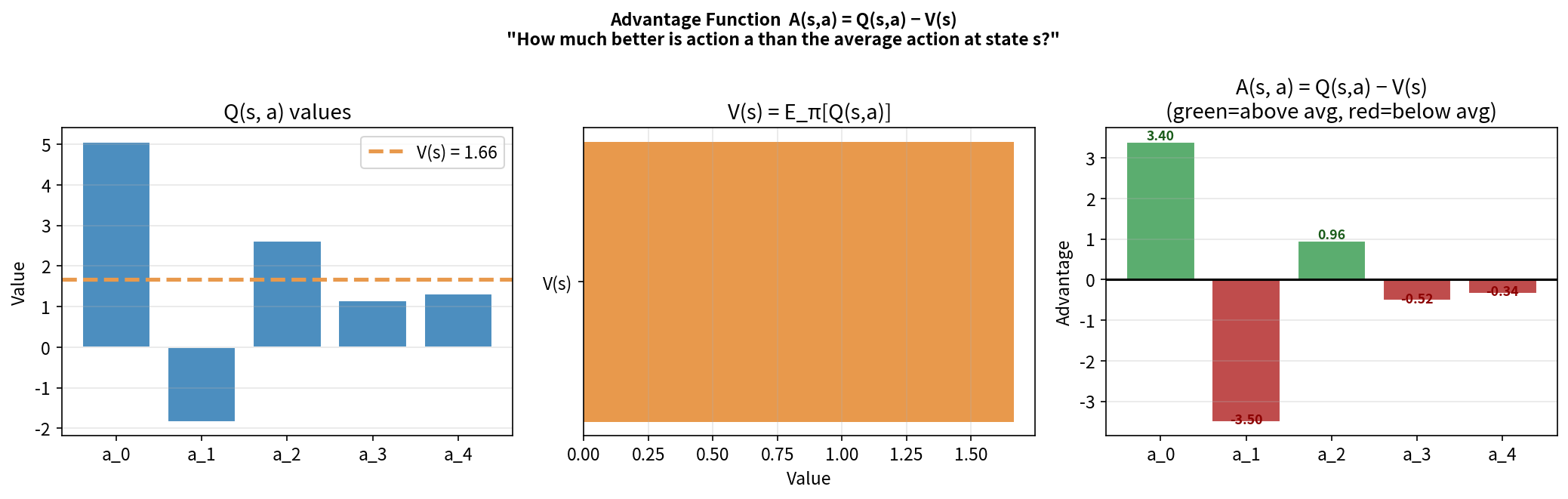
9.3 优势函数 $A(s,a)$
定义:
\[A^\pi(s, a) = Q^\pi(s, a) - V^\pi(s)\]含义:在状态 $s$ 选动作 $a$,比平均水平(按策略行动)好多少?
A(s, a) > 0:动作 a 好于平均水平 → 增加其概率
A(s, a) < 0:动作 a 差于平均水平 → 降低其概率
A(s, a) = 0:与平均持平 → 不变
为什么 $A$ 比 $Q$ 更好?
$Q$ 的量级随任务和奖励函数变化很大,$A$ 是中心化的(均值为零),梯度信号更稳定。
实际估计:TD 误差是 $A^\pi$ 的无偏估计!
\[\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t) \approx A^\pi(s_t, a_t)\]证明(期望意义下):
\[\mathbb{E}_{s_{t+1}}[\delta_t] = r_t + \gamma \mathbb{E}[V(s_{t+1})] - V(s_t) = Q^\pi(s_t, a_t) - V^\pi(s_t) = A^\pi(s_t, a_t)\]9.4 A2C 算法:Advantage Actor-Critic
更新规则:
Actor 更新(策略梯度 + 优势):
\[\theta \leftarrow \theta + \alpha_\pi \sum_t \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot \hat{A}_t\]Critic 更新(TD 误差最小化):
\[w \leftarrow w - \alpha_V \sum_t \delta_t \nabla_w V_w(s_t), \quad \delta_t = r_t + \gamma V_w(s_{t+1}) - V_w(s_t)\]完整损失函数(同一网络的多任务学习):
\[L = \underbrace{L_\text{policy}}_{-\log \pi(a|s) \cdot \hat{A}} + c_V \underbrace{L_\text{value}}_{(V(s) - G_t)^2} - c_H \underbrace{H[\pi(\cdot|s)]}_{\text{熵正则化}}\]其中熵正则项 $-H[\pi]$ 鼓励策略保持随机性(促进探索):
\[H[\pi(\cdot|s)] = -\sum_a \pi(a|s) \log \pi(a|s)\]9.5 A3C:异步 Actor-Critic
A3C(Asynchronous Advantage Actor-Critic)(Mnih et al., 2016)的核心创新:
多个 Worker 并行地与各自的环境副本交互,异步地将梯度发送给中央参数服务器。
A3C 架构:
中央参数服务器
┌──────────────────┐
│ 全局 θ, w │◄─── Worker 1 梯度
└──────────────────┘◄─── Worker 2 梯度
│ ◄─── Worker 3 梯度
定期下发参数 ◄─── Worker 4 梯度
│
┌────────┼────────┐
│ │ │
Worker₁ Worker₂ Worker₃ ... (独立环境副本)
│ │ │
Env₁ Env₂ Env₃
好处:
- 并行探索减少时序相关性(替代经验回放)
- 多样化的探索(每个 Worker 有不同的 ε 值)
- 可扩展到多核 CPU
A2C vs A3C:A2C 是 A3C 的同步版本(等所有 Worker 完成再更新),实践中 A2C 在 GPU 上往往更高效。
论文:Asynchronous Methods for Deep Reinforcement Learning — arXiv:1602.01783
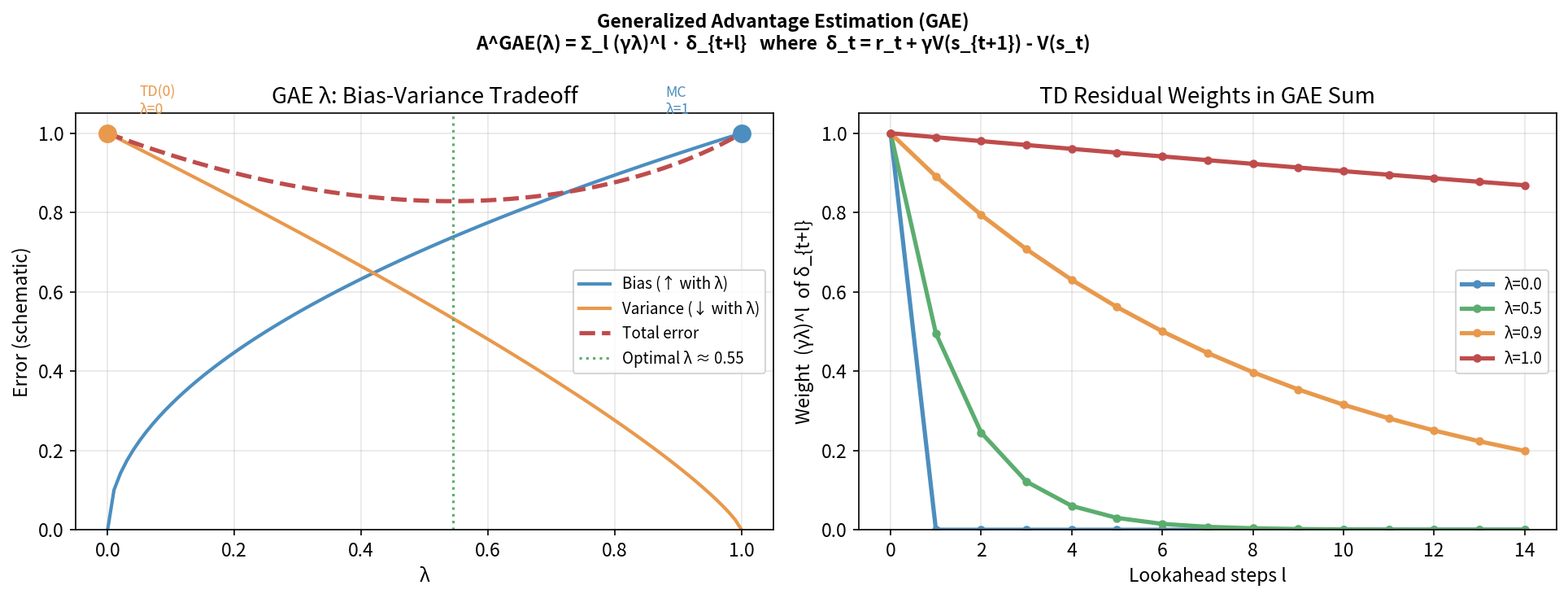
9.6 GAE:广义优势估计
Actor-Critic 中优势估计的关键问题:如何权衡偏差与方差?
单步 TD(低方差,高偏差):
\[\hat{A}_t^{(1)} = \delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)\]n步 TD(平衡):
\[\hat{A}_t^{(n)} = \sum_{l=0}^{n-1} \gamma^l r_{t+l} + \gamma^n V(s_{t+n}) - V(s_t)\]无穷步(MC,高方差,低偏差):
\[\hat{A}_t^{(\infty)} = \sum_{l=0}^{\infty} \gamma^l r_{t+l} - V(s_t) = G_t - V(s_t)\]GAE:对所有 n-step 做指数加权平均
Schulman et al. (2016) 提出用参数 $\lambda \in [0,1]$ 做 TD(λ) 风格的加权平均:
\[\hat{A}_t^{\text{GAE}(\gamma,\lambda)} = \sum_{l=0}^{\infty} (\gamma \lambda)^l \delta_{t+l}\]其中 $\delta_{t+l} = r_{t+l} + \gamma V(s_{t+l+1}) - V(s_{t+l})$。
展开形式(前几步):
\[\hat{A}_t^{\text{GAE}} = \delta_t + (\gamma\lambda)\delta_{t+1} + (\gamma\lambda)^2\delta_{t+2} + \cdots\]λ=0:GAE = δ_t (单步 TD 优势,低方差高偏差)
λ=1:GAE = Σ γˡδ_{t+l} = G_t - V(s_t) (MC 优势,高方差低偏差)
λ∈(0,1):指数衰减的多步 TD 混合,自动权衡偏差-方差
为什么叫”广义”:GAE 统一了从单步 TD 到 MC 的所有中间情形。
9.7 GAE 完整公式推导
设 $T$ 为 rollout 长度,从后向前递推计算 GAE:
\[\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)\] \[\hat{A}_T = 0 \quad \text{(轨迹末尾)}\] \[\hat{A}_t = \delta_t + (\gamma\lambda) \hat{A}_{t+1}\]这个递推公式是 PPO 实现中计算优势的标准方式。
代码伪实现:
# 从后向前计算 GAE
advantages = []
gae = 0
for t in reversed(range(T)):
delta = rewards[t] + gamma * values[t+1] * (1 - dones[t]) - values[t]
gae = delta + gamma * lam * (1 - dones[t]) * gae
advantages.insert(0, gae)
# 计算 returns(用于 Critic 训练)
returns = [adv + val for adv, val in zip(advantages, values)]
9.8 偏差-方差权衡的可视化
估计质量
方差
高 │ MC
│ \
│ \
│ \
│ \ GAE (λ=0.95 典型值)
│ \ /
│ \ /
低 │ ─┴─── TD(0)
└─────────────────► λ
0 1
偏差
高 │ ─┬─── TD(0)
│ / \
│ / \
│ / GAE \
│ / \
│ / \
低 │ MC
└─────────────────► λ
0 1
GAE(λ≈0.95):方差较低,偏差也较低,综合效果最佳
本章小结
Actor-Critic 统一了策略梯度和值函数方法:
Actor:π_θ(a|s) ← 用 Â 做策略梯度
Critic:V_w(s) ← 用 TD 误差训练
优势估计的演进:
REINFORCE:Â = G_t 高方差,低偏差
AC(单步):Â = δ_t 低方差,高偏差
GAE: Â = Σ(γλ)ˡδ_{t+l} 中间,可调节
GAE 超参数:
γ ≈ 0.99(折扣因子,几乎固定)
λ ≈ 0.95(偏差-方差权衡,PPO 默认值)
下一章:PPO = A2C + 稳定的策略更新约束 + GAE
延伸阅读
- Mnih et al. (2016). Asynchronous Methods for Deep Reinforcement Learning (A3C). ICML — arXiv:1602.01783
- A3C 官方代码:google-deepmind/learning-to-navigate
- Schulman et al. (2016). High-Dimensional Continuous Control Using Generalized Advantage Estimation (GAE). ICLR — arXiv:1506.02438
- OpenAI Spinning Up:A2C/A3C 介绍 — spinningup.openai.com
- 高质量 A2C PyTorch 实现:ikostrikov/pytorch-a2c-ppo-acktr-gail