目标:建立 RL 算法家族的完整认知地图。读完本章,你能在实际项目中快速判断”这个问题该用什么算法”,并知道每个算法为何长成现在的样子。
11.1 强化学习算法分类总览
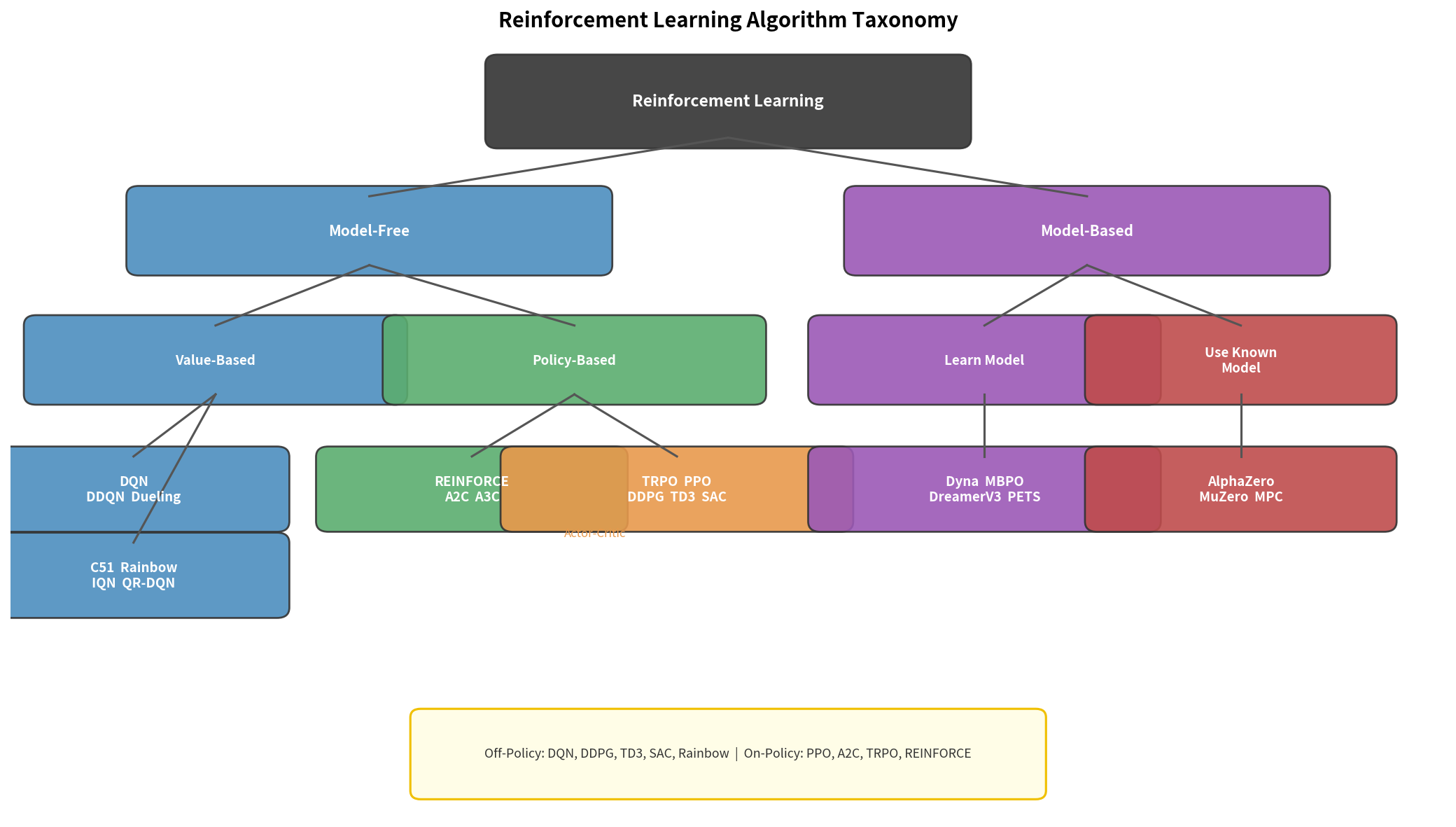
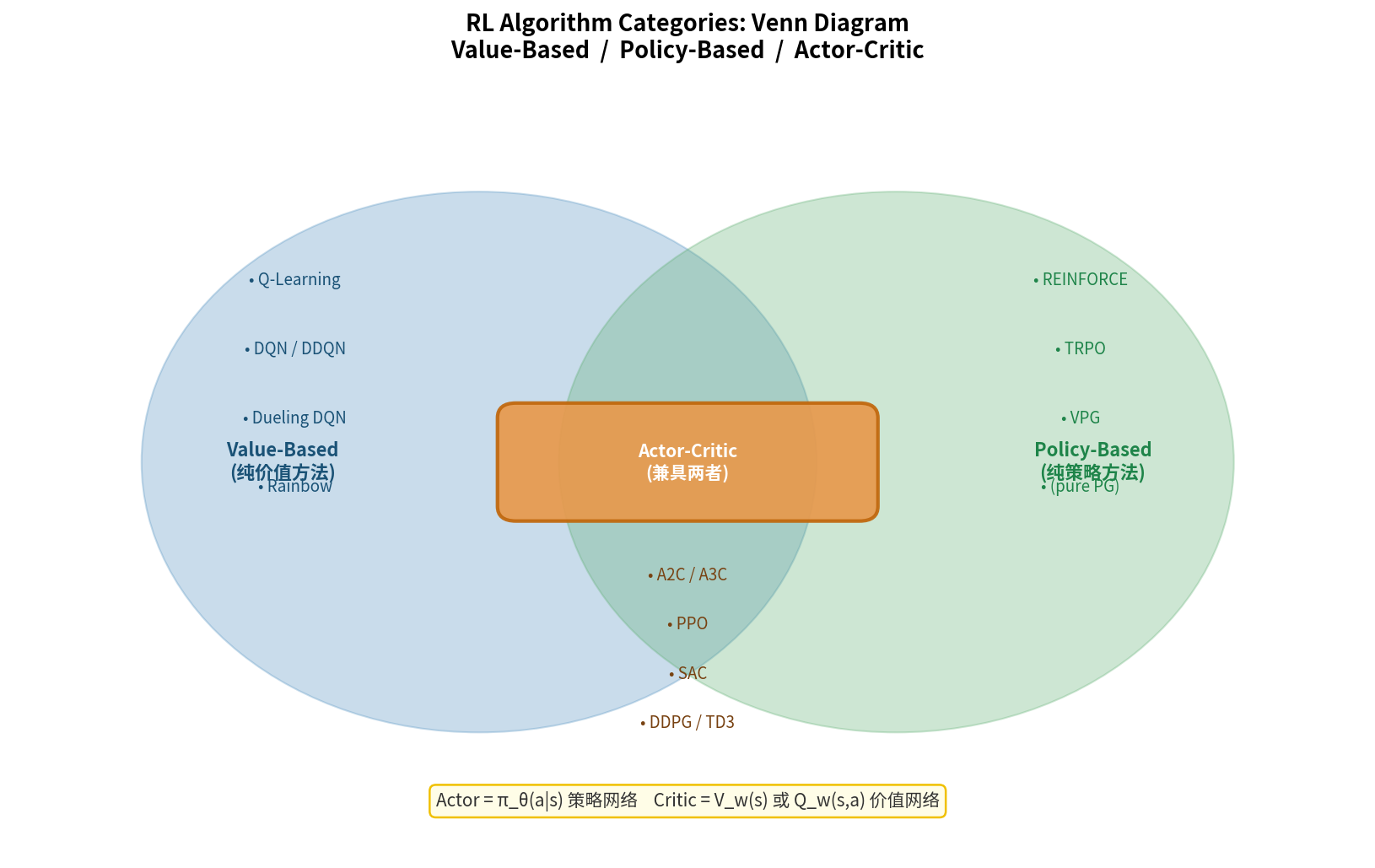
RL 算法的两大核心维度:
维度 1:是否使用环境模型
Model-Based(有模型):知道/学习 P(s'|s,a),可以规划
Model-Free(无模型):只从采样交互学习
维度 2:数据来源
On-Policy:只用当前策略采集的数据
Off-Policy:可以用任意策略(包括历史策略)的数据
全景图:
Model-Based
│
Dyna/MBPO ────┼──── World Models
│
─────────────────────────────────────────── 无模型
│
On-Policy Off-Policy
────────────────────────────────
PPO Q-Learning
A2C/A3C DQN/Rainbow
TRPO DDPG
REINFORCE TD3
SAC ← 最大熵RL
SAC-Discrete
11.2 基于模型的 RL(Model-Based RL)
Dyna 架构(Sutton, 1991)
Dyna 是最简单的 Model-Based RL 框架:
graph TD
A[环境交互] -->|真实经验| B[学习环境模型 P̂]
A -->|真实经验| C[Q-Learning 更新]
B -->|模拟经验| C
C -->|改进策略| A
| 用真实经验学习一个近似环境模型 $\hat{P}(s’ | s,a)$,然后用模型生成大量虚假经验进行训练——本质上是数据增强。 |
MBPO(Janner et al., 2019)
Model-Based Policy Optimization:用神经网络集成(ensemble)学习动力学模型,通过短 rollout 平衡模型误差。
论文:When to Trust Your Model: Model-Based Policy Optimization — arXiv:1906.08253
GitHub:jannerm/mbpo
World Models(Ha & Schmidhuber, 2018)
用变分自编码器(VAE)压缩感知,用 RNN 预测未来,在隐空间中训练策略。
论文:World Models — arXiv:1803.10122
GitHub:google/world-models
DreamerV3(Hafner et al., 2023)
目前最强的 Model-Based RL,在众多任务上超越 PPO/SAC,包括 Minecraft 钻石挑战。
论文:Mastering Diverse Domains through World Models — arXiv:2301.04104
GitHub:google-deepmind/dreamerv3
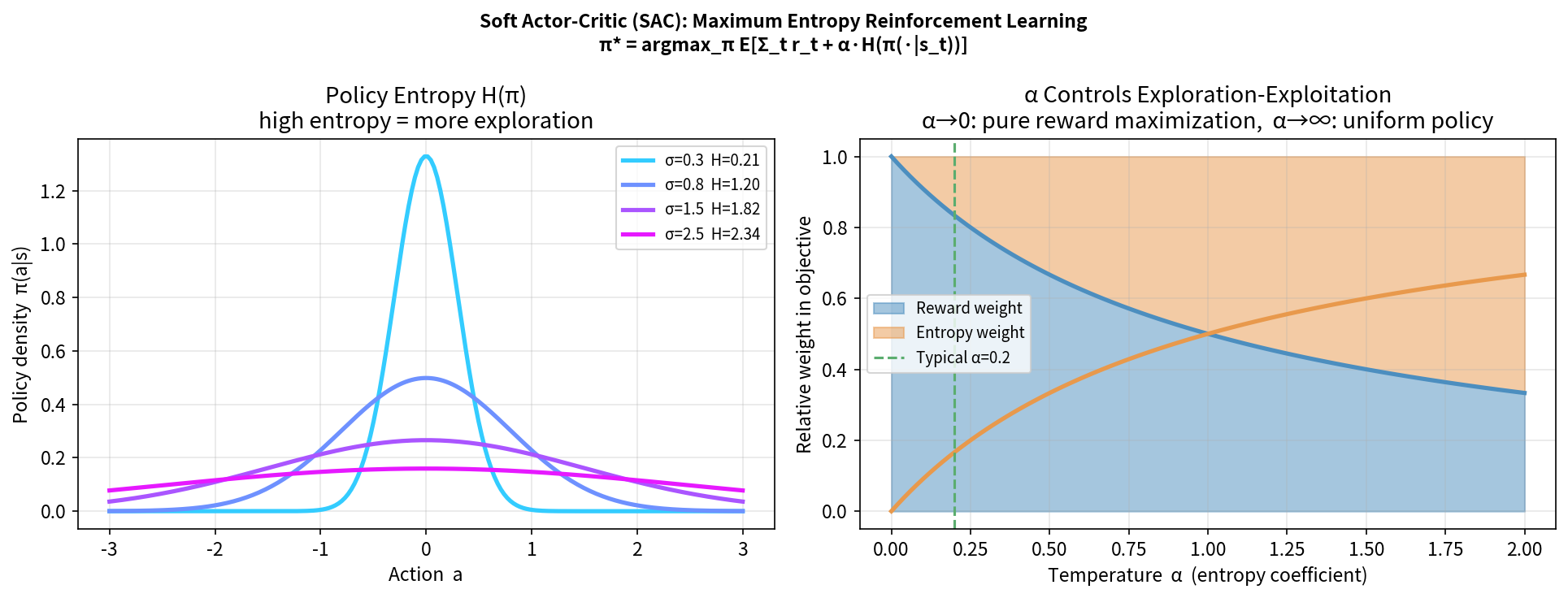
11.3 最大熵强化学习:SAC
SAC(Soft Actor-Critic) 是 Off-Policy 连续控制的顶级算法,被广泛用于真机样本昂贵的场景。
最大熵 RL 的目标
在最大化奖励的同时,最大化策略的熵:
\[\pi^* = \arg\max_\pi \mathbb{E}_\pi\left[\sum_t \left(r_t + \alpha H[\pi(\cdot|s_t)]\right)\right]\]其中 $\alpha$ 是温度参数,控制熵的重要性(可以自动调节)。
好处:
- 更强的探索(高熵 = 行为多样)
- 更鲁棒的策略(多峰分布,适应性强)
- 避免过拟合于局部最优
SAC 的核心组件
Soft Bellman 方程:
\[Q^*(s,a) = r + \gamma \mathbb{E}_{s'}[V^*(s')]\] \[V^*(s) = \mathbb{E}_{a \sim \pi}[Q^*(s,a) - \alpha \log \pi(a|s)]\]三个网络(Haarnoja et al., 2018 v2):
- Actor:$\pi_\theta(a \vert s)$(Squashed Gaussian)
- Critic $\times$ 2:$Q_{\phi_1}(s,a), Q_{\phi_2}(s,a)$(取最小值,减小高估)
- 自动调节 $\alpha$
SAC 更新步骤:
1. 从 Replay Buffer 采样
2. 计算目标:y = r + γ(min(Q₁,Q₂)(s',ā') - α·log π(ā'|s'))
ā' ~ π_θ(s')
3. 更新 Critic:最小化 (Q(s,a) - y)²
4. 更新 Actor:最大化 Q - α·log π(重参数化梯度)
5. 更新 α(可选):调整熵目标
论文:Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning (Haarnoja et al., 2018) — arXiv:1801.01290
GitHub:haarnoja/sac(原版)
推荐实现:Stable-Baselines3 SAC
11.4 确定性策略梯度:DDPG 与 TD3
DDPG(Deep Deterministic Policy Gradient)
将 DQN 的思想扩展到连续动作空间,学习确定性策略 $\mu_\theta(s)$。
Actor(确定性策略):$a = \mu_\theta(s)$
Critic:$Q_\phi(s, a)$
Policy Gradient(确定性版本):
\[\nabla_\theta J \approx \mathbb{E}_s[\nabla_a Q_\phi(s,a)|_{a=\mu_\theta(s)} \cdot \nabla_\theta \mu_\theta(s)]\]论文:Continuous control with deep reinforcement learning (DDPG) (Lillicrap et al., 2016) — arXiv:1509.02971
TD3(Twin Delayed DDPG)
修复 DDPG 的高估问题和方差问题:
| 改进 | 做法 |
|---|---|
| 双 Critic | 取两个 Q 网络的最小值(如 SAC) |
| 延迟策略更新 | Actor 每 2 步更新一次(Critic 每步更新) |
| 目标策略平滑 | 目标动作加噪声 $\tilde{a} = \mu_{\theta^-}(s’) + \epsilon$ |
论文:Addressing Function Approximation Error in Actor-Critic Methods (TD3) (Fujimoto et al., 2018) — arXiv:1802.09477
GitHub:sfujim/TD3
11.5 离线强化学习(Offline RL)
动机
有时候无法在线与真实环境交互(危险、昂贵、不可重复),但有大量历史数据。
Offline RL 的目标:只用固定数据集学习好的策略,不进行在线交互。
核心挑战:分布偏移(Distributional Shift)
数据集策略 μ(历史操作员) 的覆盖范围有限
学习的策略 π 可能访问 μ 从未访问的 (s,a) 对
→ Q 值在这些区域没有监督信号,可能严重高估
→ 策略被"哄骗"到高估区域,实际性能差
代表算法
CQL(Conservative Q-Learning):在训练数据分布外的 Q 值上加惩罚项,使其保守:
\[L^{CQL} = \alpha \cdot \mathbb{E}_{s \sim D, a \sim \pi}[Q(s,a)] - \alpha \cdot \mathbb{E}_{s,a \sim D}[Q(s,a)] + L^{TD}\]论文:Conservative Q-Learning for Offline Reinforcement Learning (Kumar et al., 2020) — arXiv:2006.04779
IQL(Implicit Q-Learning)(Kostrikov et al., 2021):无需对 policy 采样,完全在数据集上做 in-sample 更新,训练更稳定。
论文:Offline Reinforcement Learning with Implicit Q-Learning — arXiv:2110.06169
11.6 算法选型指南
任务类型 → 推荐算法
离散动作空间(游戏/格子世界):
→ DQN/Rainbow(经典)
→ PPO(也适用)
连续控制 + 仿真充足:
→ PPO(稳定,大规模并行,Isaac Gym 首选)
连续控制 + 样本昂贵(真机):
→ SAC(Off-Policy,样本效率最高)
→ TD3(确定性,低方差)
稀疏奖励:
→ HER(Hindsight Experience Replay)+ SAC/TD3
→ PPO + 课程学习
有动力学模型(或可学习):
→ DreamerV3, MBPO
固定数据集(无在线交互):
→ IQL, CQL(Offline RL)
多智能体:
→ MAPPO(PPO 多智能体版本)
→ QMIX(值分解方法)
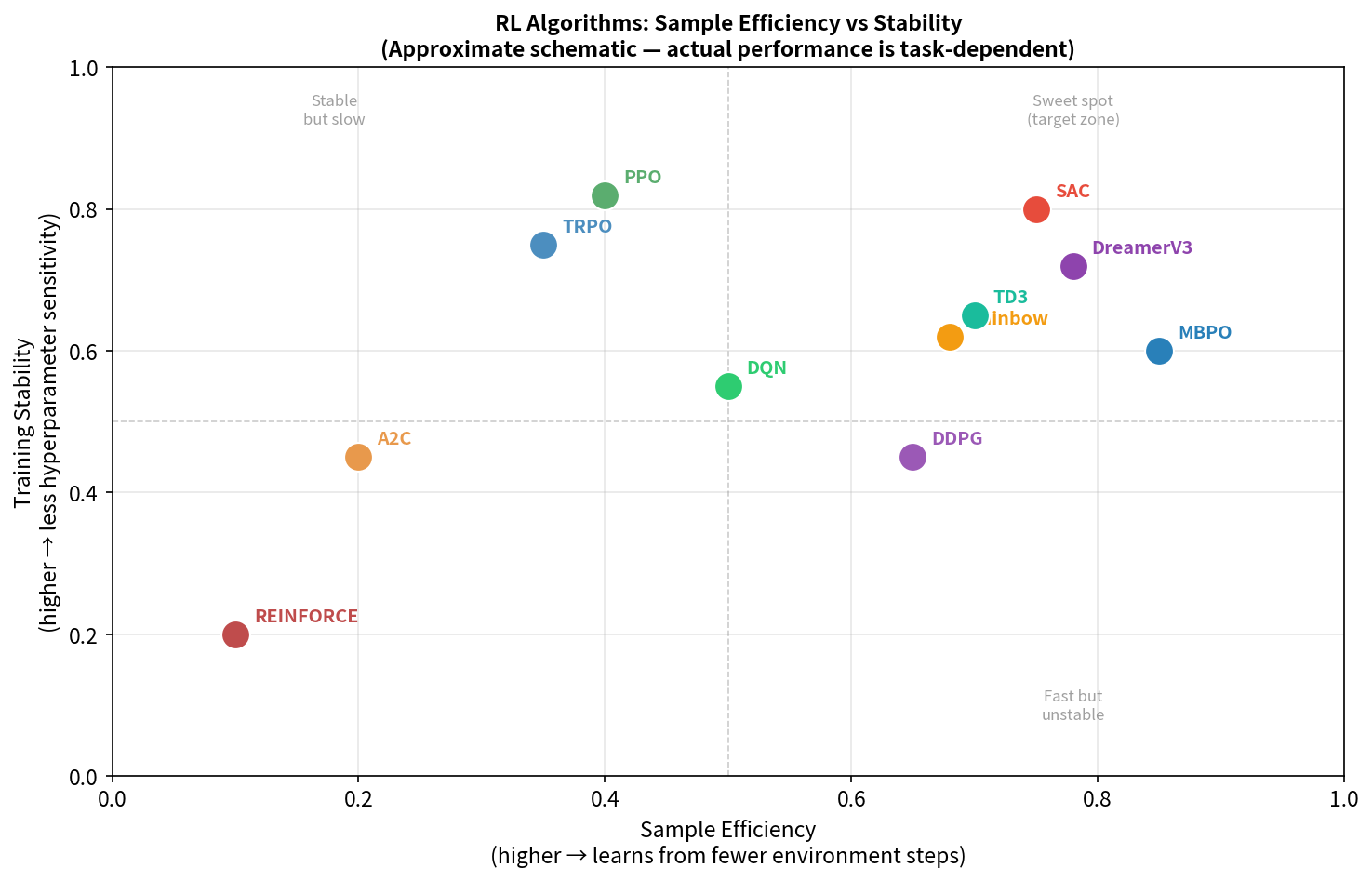
11.7 主流算法性能定位
样本效率(每个 env step 的学习量)
高 │ SAC
│ TD3 /
│ /
│ DDPG /
│ /
│ DQN /
│ /
低 │ PPO---/
└──────────────────────────────────────
低 适用场景复杂度 高
训练稳定性:PPO > A2C > SAC > TD3 > DDPG
工程实现难度:DQN < PPO < SAC < TD3 < TRPO < MBPO
11.8 2025–2026 Algorithm Advances
The RL algorithm landscape has evolved significantly since 2024, particularly at the intersection with generative models and large-scale robot training.
DreamerV3 and World Models for Robotics
DreamerV3 (Hafner et al., 2023–2024) matured into a practical tool for physical robot learning. Its key innovation — learning a compact latent world model and training the policy entirely in imagination — enables high sample efficiency on real hardware where environment interactions are expensive. By 2025, DreamerV3 variants achieved competitive locomotion performance with 10× fewer real robot samples than PPO baselines.
Key insight: For tasks where simulation is unreliable or unavailable, world-model-based RL offers a path to real-robot learning without large-scale sim-to-real pipelines.
Diffusion Policies and Flow Matching
Diffusion Policy (Chi et al., 2023) and its successor Flow Matching Policy demonstrated that treating policy learning as a score-matching / generative modeling problem produces more expressive, multimodal action distributions than Gaussian policies. By 2025, these were being applied to whole-body loco-manipulation tasks where the policy must handle multiple feasible motion modes.
Relevance: For contact-rich tasks (getting up from the floor, dexterous manipulation), diffusion policies outperform standard Actor-Critic on mode coverage. For pure locomotion speed/efficiency, PPO remains dominant.
RLHF Adaptations for Physical Robots
Reinforcement Learning from Human Feedback (RLHF) — originally developed for LLMs — was adapted for physical robots in 2024–2025. The key challenge is that human preference labels are expensive to collect for robot trajectories. Two adaptations gained traction:
- Reward Model Pre-training from Video: Train a reward model from human-labeled robot video clips, then use it to shape RL rewards — avoiding the need for manual reward engineering.
- Constitutional AI for Robots: Use an LLM to generate preference labels from high-level task descriptions, bootstrapping reward models without direct human annotation.
Large-Scale Multi-Task RL
Projects like HumanoidBench (2024) and OKAMI (2025) established standardized benchmarks for multi-task humanoid RL, enabling fair comparison across algorithms. The emerging consensus: PPO + curriculum + domain randomization remains the most reliable pipeline for locomotion, while SAC + offline pretraining (from demonstrations) is preferred for dexterous manipulation.
本章小结
算法选型核心问题:
1. 动作空间连续还是离散?
离散 → DQN/PPO
连续 → PPO(有仿真)/ SAC(样本贵)
2. On-Policy 还是 Off-Policy?
On-Policy(PPO):稳定,但样本用完即弃
Off-Policy(SAC/TD3):样本效率高,但调参更难
3. 有没有环境模型?
有 → DreamerV3/MBPO(更好的样本效率)
没有 → Model-Free 方法
4. 数据来源是在线还是离线?
在线 → 上述所有方法
离线 → IQL/CQL
延伸阅读
- OpenAI Spinning Up 算法介绍(完整, 推荐)— spinningup.openai.com
- Haarnoja et al. (2018). Soft Actor-Critic (SAC) — arXiv:1801.01290
- Fujimoto et al. (2018). TD3 — arXiv:1802.09477
- Hafner et al. (2023). DreamerV3 — arXiv:2301.04104
- Kumar et al. (2020). CQL — arXiv:2006.04779
- Offline RL 综述:Offline Reinforcement Learning: Tutorial, Review, and Perspectives (Levine et al., 2020) — arXiv:2005.01643