目标:理论与真机之间的距离并不是纸上谈兵——这一章带你把前面所有知识落地到真实的机器人 RL 工程中。
12.1 仿真环境的作用与选型
为什么必须用仿真
真机训练不现实:
PPO 训练 G1 机器人行走需要:
~500M 仿真步 × 控制频率 50Hz = 10M 秒 = 115 天(真机时间)
× 4096 并行仿真:
= 115天 / 4096 ≈ 40 分钟(GPU 仿真时间)
→ 仿真快了 10,000 倍!
主流仿真器对比
┌────────────────────────────────────────────────────────────┐
│ 仿真器对比 │
├──────────────┬──────────────┬─────────────┬────────────────┤
│ 仿真器 │ 物理精度 │ 并行性能 │ 主要用途 │
├──────────────┼──────────────┼─────────────┼────────────────┤
│ MuJoCo │ 高(关节约束)│ CPU 多进程 │ 学术研究标准 │
│ Isaac Gym │ 中高 │ GPU 数千并行│ 大规模 RL 训练 │
│ Isaac Lab │ 高(PhysX5) │ GPU 数千并行│ 下一代 Isaac │
│ Genesis │ 高(可微分) │ GPU 极速 │ 2024 新星 │
│ PyBullet │ 中 │ CPU │ 免费易用 │
│ Webots │ 中 │ CPU │ 教育/科研 │
└──────────────┴──────────────┴─────────────┴────────────────┘
Isaac Lab + G1 机器人 是目前人形机器人 RL 的主流选择:
- NVIDIA GPU 驱动,单卡 4096+ 环境并行
- 官方支持 Unitree 机器人模型(G1, H1, Go2 等)
- 与 ROS2 集成,方便 Sim-to-Real 部署
GitHub:isaac-sim/IsaacLab
Genesis(2024 新仿真器):Genesis-Embodied-AI/Genesis
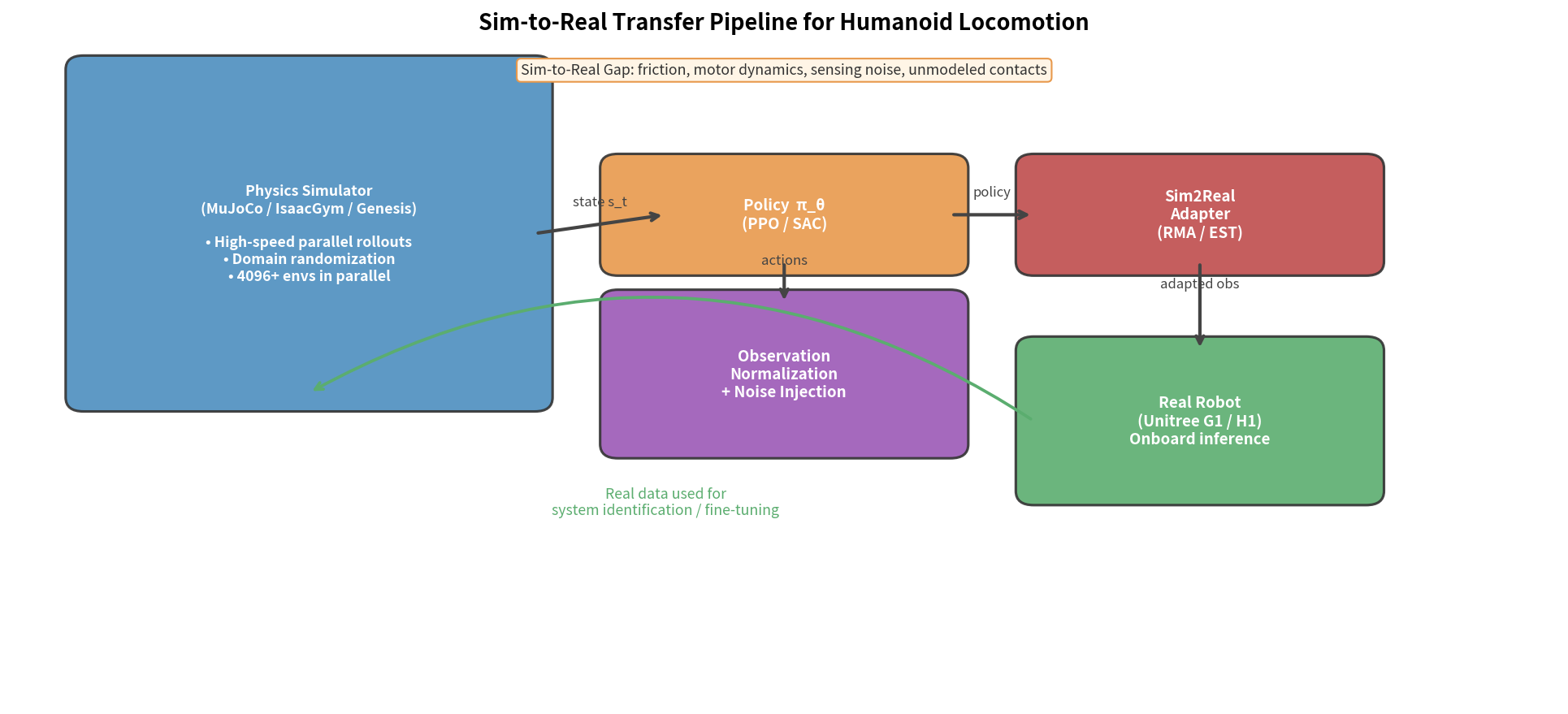
12.2 Sim-to-Real Gap 的来源
这是机器人 RL 落地最大的挑战:
┌─────────────────────────────────────────────────────────┐
│ Sim-to-Real Gap 来源清单 │
├────────────────────────┬────────────────────────────────┤
│ 误差类型 │ 具体例子 │
├────────────────────────┼────────────────────────────────┤
│ 动力学模型误差 │ 仿真摩擦力 ≠ 真实地面摩擦 │
│ │ 仿真关节阻尼 ≠ 真实电机特性 │
│ │ 刚体假设 vs 实际弹性/形变 │
│ 传感器噪声 │ 仿真 IMU 完美,真实 IMU 有漂移 │
│ │ 关节编码器量化误差 │
│ 控制延迟 │ 仿真步骤同步,真实有通信延迟 │
│ │(通常 5~20ms) │
│ 感知差异 │ 仿真无图像噪声,真实图像有干扰 │
│ 建模省略 │ 仿真忽略电缆拉力、热效应等 │
│ 地形差异 │ 仿真地形 ≠ 真实地面不平整度 │
└────────────────────────┴────────────────────────────────┘
关键结论:不是”仿真训好了真机也好”,而是需要主动设计来弥合这个 Gap。
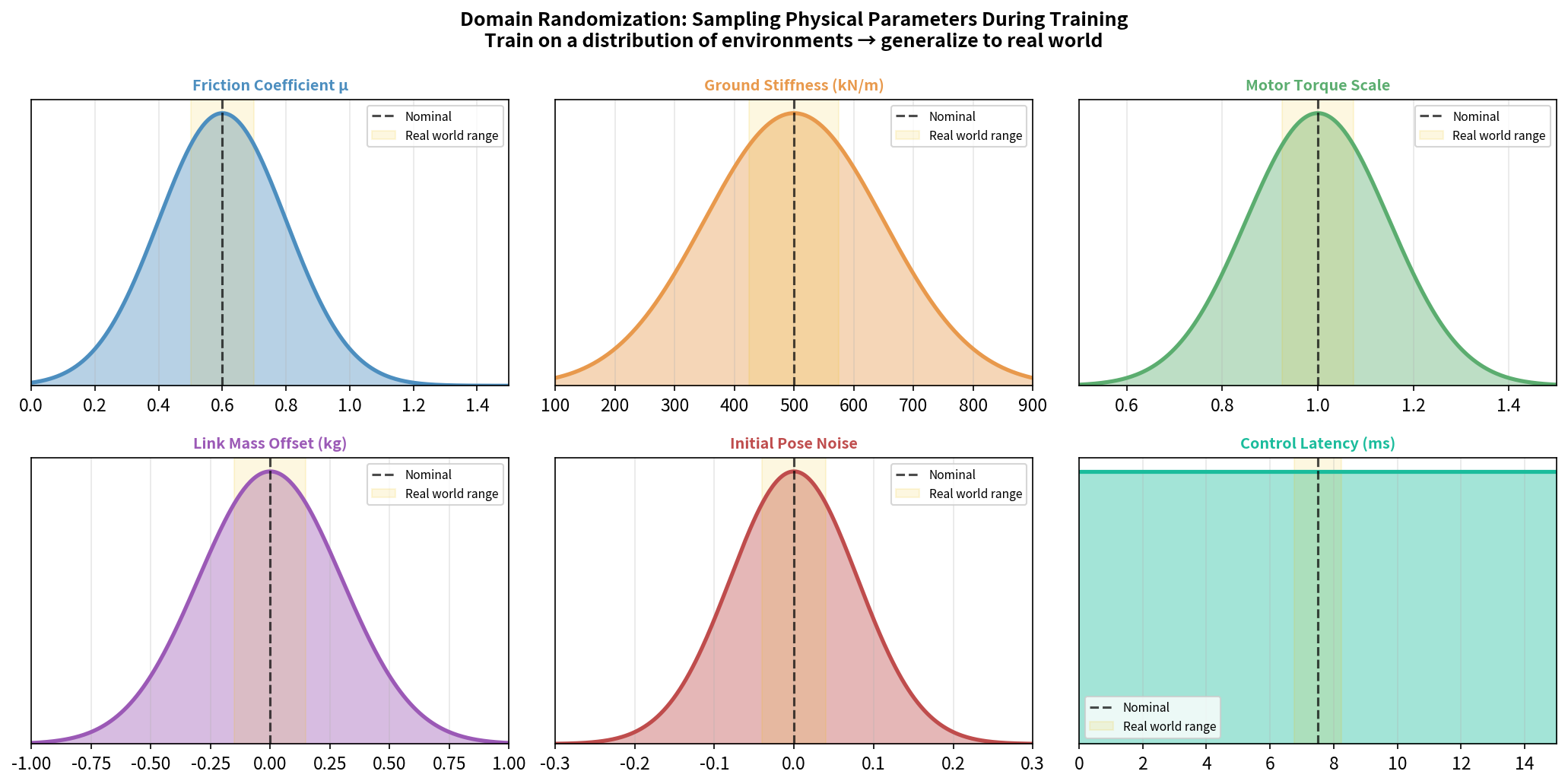
12.3 域随机化(Domain Randomization)
核心思想:在训练时随机化仿真参数,使得真实环境只是”随机化参数空间中的一个样本”。
训练时随机化的参数:
物理参数:
质量:× U[0.8, 1.2](质量随机 ±20%)
摩擦系数:U[0.3, 1.5]
关节阻尼:× U[0.5, 1.5]
质心位置:+ N(0, 0.02m)
外部扰动:
随机推力:每隔 T 步施加随机推力 F ~ U[-50N, 50N]
地形随机:随机高低起伏地形
观测噪声:
观测加噪:o = o_true + N(0, σ²)
延迟模拟:将上一步动作作为观测输入(模拟控制延迟)
为什么有效:策略学会了在宽泛的物理参数下都能行走,真实环境的参数自然落在这个范围内。
关键论文:Sim-to-Real Transfer of Robotic Control with Dynamics Randomization (Tobin et al., 2017) — arXiv:1703.06907
Unitree G1 实际域随机化设置(参考 legged_gym):
# 来自 legged_gym 配置
domain_rand = {
"randomize_friction": True,
"friction_range": [0.25, 1.75],
"randomize_base_mass": True,
"added_mass_range": [-1., 3.], # kg
"push_robots": True,
"push_interval_s": 15,
"max_push_vel_xy": 1.5, # m/s
}
12.4 奖励函数设计的艺术
奖励函数是 RL 工程中最需要创造力和领域知识的部分。
稀疏奖励 vs 稠密奖励
稀疏奖励(Sparse Reward):
r = +1 只在完成任务时
r = -1 只在失败时
优点:客观,不引入人为偏见
缺点:信号太稀疏,学习极难(随机探索找到奖励的概率极低)
稠密奖励(Dense Reward):
每步都有反馈信号(速度、能量、稳定性等分项)
优点:学习信号丰富,收敛快
缺点:需要精心设计,否则 Agent 可能"钻漏洞"(reward hacking)
奖励钻漏洞(Reward Hacking)的经典例子:
目标:机器人尽量高速前进
奖励:forward_velocity
结果:机器人学会了翻滚前进(不是走路!)
→ 翻滚虽然不好看,但确实前进快
解决:增加 height_penalty(鼓励保持直立姿态)
+ foot_contact_reward(奖励正常步态接触)
奖励塑形(Reward Shaping)
Potential-Based Reward Shaping(PBRS)(Ng et al., 1999)提供了理论保证:
\[r'(s, a, s') = r(s, a, s') + \gamma \Phi(s') - \Phi(s)\]若 $\Phi$ 是状态势函数,则 $r’$ 不改变最优策略(PBRS 不改变 MDP 的最优解)。
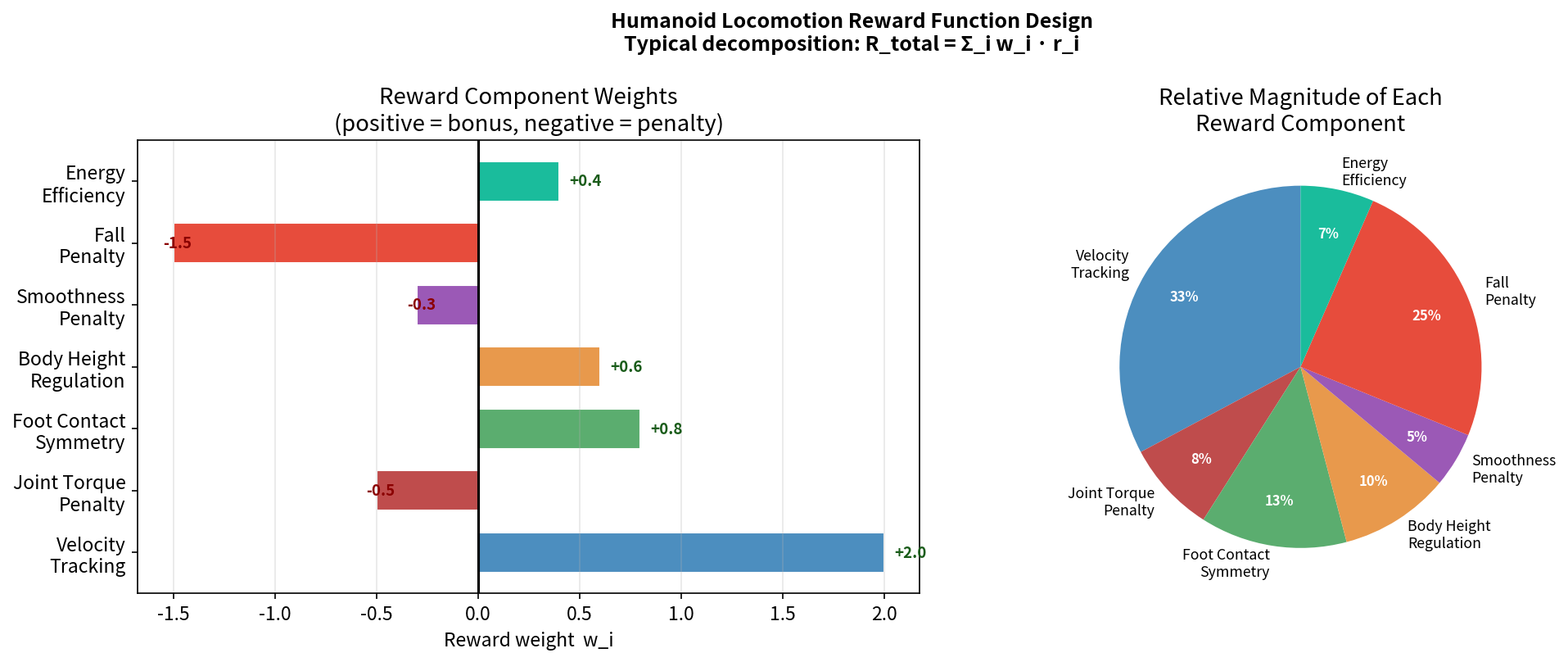
实践中常用的奖励组件(人形机器人行走):
def compute_reward(env):
# ① 跟踪目标速度(核心目标)
lin_vel_error = torch.sum((cmd_vel - base_lin_vel)**2, dim=1)
r_tracking = torch.exp(-lin_vel_error / 0.25)
# ② 体高惩罚(防止蹲下)
r_height = -torch.abs(base_height - target_height)
# ③ 能量惩罚(节能,使运动更自然)
r_torque = -torch.sum(torques**2, dim=1) * 1e-5
# ④ 步态奖励(奖励规律的迈步)
r_feet_air = compute_feet_air_time(env)
# ⑤ 平滑性惩罚(防止抖动)
r_action_rate = -torch.sum((actions - last_actions)**2, dim=1)
# ⑥ 姿态惩罚(保持躯干直立)
r_orientation = -torch.sum((projected_gravity[:, :2])**2, dim=1)
return (1.0 * r_tracking + 0.5 * r_height +
r_torque + 0.2 * r_feet_air +
0.01 * r_action_rate + 0.5 * r_orientation)
12.5 课程学习(Curriculum Learning)
核心思想:从简单任务开始,逐渐增加难度,就像人类学习”先学平地走路,再学爬坡,再学障碍物”。
自动课程(Adaptive Curriculum)
阶段 1(简单):
平坦地面,低速目标(0.5 m/s),无外力
阶段 2(中等):
轻微随机地形(±2cm),目标速度提高(1.0 m/s),
随机推力 ±10N
阶段 3(困难):
崎岖地形(±10cm),高速(2.0 m/s),
强随机推力 ±50N
阶段 4(全速):
复杂地形,最大速度,所有扰动
自动触发进阶条件:当当前阶段的平均奖励达到阈值(如 80% 最大奖励)时,切换到下一阶段。
legged_gym 的 AMP(Adversarial Motion Priors) 课程:利用运动捕捉数据作为先验,引导策略生成自然步态。
论文:Learning to Walk in Minutes Using Massively Parallel Deep Reinforcement Learning (legged_gym) (Rudin et al., 2022) — arXiv:2109.11978
GitHub:leggedrobotics/legged_gym
12.6 状态观测的工程处理
G1 机器人的标准状态向量设计
观测向量(~45-75维,具体取决于设计):
基础状态(~20维):
- 基座角速度 (3) ← IMU 测量
- 投影重力方向 (3) ← IMU 推算(躯干姿态)
- 指令速度 [vx, vy, ω] (3) ← 用户输入
- 关节角度 (12) ← 编码器读数
- 关节角速度 (12) ← 编码器差分
历史帧(可选,处理延迟):
- 上一步动作 (12) ← 反馈延迟补偿
- 上两步动作 (12)
步态相位(可选,显式步态节奏):
- 相位编码 [sin(φ), cos(φ)] (2 或 8)
不包含的量(有意为之):
- 基座绝对位置:不可观测(GPS 不可靠)
- 绝对朝向:不需要(只需要相对指令方向)
- 脚部接触力:部分机器人没有力传感器(需通过状态估计推断)
观测归一化
# 标准归一化(运行时均值方差估计)
obs_norm = (obs - running_mean) / (running_std + 1e-8)
obs_clipped = torch.clip(obs_norm, -5, 5) # 截断避免极值
# 奖励归一化(提升训练稳定性)
reward_norm = reward / running_std_reward
12.7 策略网络结构选择
MLP(多层感知机)——最常用
输入: obs (45~75维)
↓
Linear(512) + ELU
↓
Linear(256) + ELU
↓
Linear(128) + ELU
↓
Actor head: Linear(12) + Tanh × action_scale
Critic head: Linear(1)
优点:简单快速;缺点:无历史记忆(需要通过堆叠帧近似)
GRU/LSTM(循环网络)
自然处理历史信息,适合 POMDP 场景。
obs_t → GRU → h_t → [Actor, Critic]
h_{t-1} ↗ ↗ h_t(传递到下一步)
缺点:并行效率低,需要在 rollout 中维护隐状态。
Transformer(历史注意力)
RMA(Rapid Motor Adaptation) 框架(Kumar et al., 2021)用 Transformer 在线适应环境变化,是 Sim-to-Real 的重要进展:
论文:RMA: Rapid Motor Adaptation for Legged Robots — arXiv:2107.04034
12.8 Unitree G1 行走控制 RL 实战复盘
典型训练流程(基于 legged_gym)
环境:Isaac Gym + Unitree G1 URDF
GPU:单卡 A100 或 4090
训练时间:~2小时达到稳定步态,~8小时充分收敛
步骤 1:环境搭建
pip install isaacgym
git clone leggedrobotics/legged_gym
配置 G1 的 URDF 和关节限制
步骤 2:奖励函数调试
先只用速度跟踪奖励 + 摔倒惩罚
观察机器人是否能站立(若不能,检查初始化)
逐步添加其他奖励项
步骤 3:课程设置
初始:小速度目标 (0.5m/s),平坦地面
收敛后:增加速度 + 地形随机化
步骤 4:策略导出 & 真机部署
导出 onnx 或 torchscript 格式
真机控制频率:50Hz(策略推理 ~1ms)
低层 PD 控制器:Kp=40, Kd=1(典型值)
Sim-to-Real 部署检查清单
部署前必须确认的事项:
[ ] 观测向量定义与训练时完全一致
[ ] 动作缩放(action_scale)与训练一致
[ ] 控制频率匹配(仿真 50Hz = 真机 50Hz)
[ ] 延迟处理:将上一步动作加入观测
[ ] 电机保护:软限位 + 关节力矩限制
[ ] 紧急停止:摔倒检测 → 立即关闭力矩
[ ] 域随机化范围覆盖真实参数(质量、摩擦等)
[ ] 真机测试顺序:悬挂测试 → 低速行走 → 全速
常见 Sim-to-Real 失败模式
失败 1:真机关节抖动
原因:仿真阻尼过低,控制增益不匹配
修复:增加仿真关节阻尼,或用观测延迟模拟
失败 2:真机原地小碎步,无法迈开
原因:策略学到了"保守但不摔倒"的局部最优
修复:检查速度跟踪奖励的权重,增加步幅奖励
失败 3:真机侧向漂移
原因:机器人质心估计偏差,或仿真未考虑机器人不对称
修复:加强横向速度惩罚,增大质心位置随机化范围
失败 4:真机在不平路面摔倒
原因:域随机化地形范围不够
修复:增大训练地形随机化,或用 Blind Locomotion 方法
人形机器人 RL 关键工程项目导航
项目 内容 链接
─────────────────────────────────────────────────────────────
legged_gym(ETH) 四足/人形 PPO 训练框架 ★★★★★
→ leggedrobotics/legged_gym
IsaacLab(NVIDIA) 下一代 Isaac 训练平台 ★★★★★
→ isaac-sim/IsaacLab
humanoid-gym(UCB) 人形机器人 RL(H1/G1) ★★★★
→ roboterax/humanoid-gym
unitree_rl_gym Unitree 官方 RL 训练套件 ★★★★
→ unitreerobotics/unitree_rl_gym
rsl_rl ETH 高性能 PPO 实现(被上述调用)★★★★
→ leggedrobotics/rsl_rl
AMP(Motion Priors) 运动先验引导的自然步态 ★★★★
→ nv-tlabs/AMP_for_hardware
12.9 Sim-to-Real Advances: 2025–2026
The sim-to-real gap has narrowed dramatically since 2022, with several key advances making real-robot deployment increasingly reliable.
Whole-Body Control and Loco-Manipulation
The boundary between locomotion and manipulation has blurred. By 2025, whole-body controllers trained in simulation could transfer reliably to real humanoids for tasks combining movement and arm use. Key enablers:
- Asymmetric Actor-Critic with Privileged Information: The Critic receives full physics state during training (contact forces, exact body velocities), while the Actor receives only onboard sensor observations. This closes the sim-to-real gap without explicit adaptation modules.
- Unitree G1 Whole-Body Control: Multiple research groups demonstrated loco-manipulation tasks — carrying objects while walking, opening doors, getting up from the floor — using PPO + domain randomization in IsaacLab.
Real-World Deployment Results (2025)
| Robot | Task | Method | Notes |
|---|---|---|---|
| Unitree G1 | Walking on diverse terrain | PPO + IsaacLab | Open-source, replicated by 50+ groups |
| Unitree H1 | Stair climbing + outdoor | PPO + curriculum | Terrain curriculum: flat→slopes→stairs |
| Figure 02 | Loco-manipulation | PPO + motion priors | Asymmetric A-C, retargeted MoCap |
| Boston Dynamics Atlas | Parkour | Custom RL + MPC | Combined learning + planning |
| 1X Neo | Full-body teleoperation → RL | BC + DAgger fine-tune | Human demo bootstrapping |
Adaptive Sim-to-Real: Online Adaptation
RMA (Rapid Motor Adaptation) (Kumar et al., 2021) established the paradigm: train a base policy with full privileged state, then distill an adaptation module that estimates environmental parameters from history. By 2025, extensions included:
- Online Domain Adaptation: Continuously update a lightweight adapter during deployment using recent interaction history — no need for explicit re-training when terrain or payload changes.
- Sensor Failure Robustness: Policies trained with random sensor dropout in simulation transfer to real robots even when sensors partially fail, without explicit fault detection.
Genesis Simulator (2024–2025)
Genesis (Genesis-Embodied-AI/Genesis), released late 2024, demonstrated GPU-accelerated differentiable simulation at 430,000 FPS for simple environments — roughly 80× faster than Isaac Gym. By 2025, Genesis-based training pipelines were being evaluated for humanoid locomotion, with promising early results on sim-to-real transfer quality due to its higher physical accuracy for contacts.
MuJoCo MPC and Contact-Rich Manipulation
MuJoCo MPC (MJPC) (Howell et al., 2022) combined trajectory optimization with learned components, enabling fast on-robot replanning at 500+ Hz. For contact-rich tasks where pure RL struggles (precise foothold placement, dexterous grasping), MJPC + RL hybrid approaches showed superior performance in 2025 benchmarks.
GitHub: google-deepmind/mujoco_mpc
Emerging Best Practices (2025–2026)
Domain Randomization:
- Adaptive DR: start narrow, expand ranges as policy improves
- System identification + targeted randomization (not uniform)
- Measured real-robot parameters → tighter randomization bounds
Reward Engineering:
- Style rewards from motion capture (AMP/MotionLib) now standard
- Prefer energy efficiency terms over hard constraints
- Foot clearance + symmetry terms reduce limping behaviors
Deployment:
- Safety filter layer (CBF or simple geometric) in hardware loop
- Gradual rollout: suspension → treadmill → outdoor
- Online logging of sensor residuals for drift detection
本章小结
Sim-to-Real 的四大工程支柱:
1. 域随机化:让训练参数分布包含真实世界
2. 奖励工程:精心设计奖励,避免钻漏洞
3. 课程学习:从易到难,渐进提高任务难度
4. 状态设计:只用可在真机观测的量,处理延迟
从仿真到真机的核心检查:
✓ 控制频率匹配
✓ 观测定义一致
✓ 动作缩放一致
✓ 安全保护到位
延伸阅读
- Rudin et al. (2022). Learning to Walk in Minutes (legged_gym) — arXiv:2109.11978
- legged_gym GitHub:leggedrobotics/legged_gym
- Kumar et al. (2021). RMA: Rapid Motor Adaptation — arXiv:2107.04034
- Tobin et al. (2017). Domain Randomization for Sim-to-Real — arXiv:1703.06907
- ETH Zurich ANYmal sim-to-real:Learning to Walk in 20 Minutes (Lee et al., 2020) — arXiv:1907.04245
- humanoid-gym(UCB / Berkeley):roboterax/humanoid-gym
- IsaacLab 官方文档:isaac-sim.github.io/IsaacLab